
|
|
|
|
HEAD-WAY NAVIGATED WHEELCHAIR WITH BLUETOOTH CONTROL
Dr. R. RameshBabu 1![]() , Sakthi Mahendran G 2
, Sakthi Mahendran G 2![]() , Dharanidharan S 2
, Dharanidharan S 2![]() , Gokula Krishnan S 2
, Gokula Krishnan S 2![]() , Akash K 2
, Akash K 2![]()
1 Associate
Professor, Department of Electronics and Communication Engineering, VSB
Engineering College, Karur, Tamil Nadu, India
2 Department
of Electronics and Communication Engineering, VSB Engineering College, Karur,
Tamil Nadu, India
|
|
|
ABSTRACT |
|
|
This paper
introduces a significant advancement in assistive mobility technology by
adding an head-way navigation technique to the
normal wheelchair. It addresses the cost issue of traditional electric
wheelchairs, which can be over 60000 Rupees, providing an affordable solution
for people with physical disabilities. These wheelchairs might have trouble
accurately recognizing speech and might not be usable by nonverbal users,
which could raise privacy issues and increase reliance on unreliable
technology. The innovative control mechanism relies on the user's head
movements, eliminating the need for physical effort during movement. The
wheelchair is now equipped with obstacle detection technique using ultrasonic
sensor, ensuring user safety, Bluetooth control and body temperature
measurement. This obstacle detection system gives alert and makes automatic
adjustments, making the wheelchair suitable for different environments. If
the user had a pain in his neck, he can control the wheelchair by using mobile app. The
temperature sensor is placed on the wheelchair to actively monitor the
patient’s body temperature. In conclusion, the paper presents an enhanced
Head-Way Navigation, combining affordability, user-controlled mobility, and
obstacle detection to empower individuals with increased safety and
independence. |
|||
|
Received 23 March 2024 Accepted 26 April 2024 Published 16 May 2024 Corresponding Author Sakthi
Mahendran G, sakthigovinth71@gmail.com
DOI 10.29121/ijetmr.v11.i5.2024.1452 Funding: This research
received no specific grant from any funding agency in the public, commercial,
or not-for-profit sectors. Copyright: © 2024 The
Author(s). This work is licensed under a Creative Commons
Attribution 4.0 International License. With the
license CC-BY, authors retain the copyright, allowing anyone to download,
reuse, re-print, modify, distribute, and/or copy their contribution. The work
must be properly attributed to its author.
|
|||
|
Keywords: Assistive
Mobility, Head-Way Navigation, Quadriplegic Patients, Neck Pain Relief,
Increased Safety, Thermistor |
|||


1. INTRODUCTION
Nowadays, many elderly and physically disabled individuals require wheelchairs for easy personal mobility. Wheelchairs enable them to move effortlessly from one place to another Kumar et al. (2015) . Including only Aleksandar & Branko (2013) Head-way navigation will cause pain in the patient’s neck. One of the ways may be Gao et al. (2023) Vision-based head posture control wheelchair system. Radhika et al. (2023) The creation of a voice-activated, real-time wheelchair system using a mobile application is the subject of the prior work. Wheelchair systems that rely on vision-based head posture control may face difficulties in accurately navigating in different lighting conditions and may be impacted by occlusions. This could result in navigation errors and difficulties with precise control for users.
Standard wheelchairs often need assistance from another person or self-propelling, posing challenges. To address these issues, electric wheelchairs or joystick-controlled wheelchairs are commonly used, but they can be quite expensive, ranging from 50,000 Rupees and more. Srivastava et al. (2014) Smart wheelchairs with dual control systems that combine gesture and voice control may have trouble telling one command from the other, which could cause confusion or unintentional actions. Users may also have to adjust to two distinct control modalities, adding to the complexity and cognitive load of the system. In contrast, the Head-motion Controlled Wheelchair presented in this paper is significantly more affordable than electric or joystick-controlled alternatives available in the market.
The Head-motion Controlled Wheelchair proves superior to conventional joystick wheelchairs, especially for individuals with paralysis named “Tetraplegia”. Unlike joystick wheelchairs that require hand motion, the head-motion controlled wheelchair operates by detecting head movements. Additionally, when some other patient is using this wheelchair, he can use both head-way navigation and his mobile to control the wheelchair. It is more cost-effective than joystick wheelchairs. Shaheen & Umakeswari (2013) People with disabilities can get several benefits from intelligent wheelchairs, which can greatly enhance their quality of life. This paper explores the research on head-motion controlled wheelchairs, covering aspects like gesture types, interfaces, technologies used, user types, issues, problems, advantages, and the final results. The technology implemented in this wheelchair uses an ADXL335 accelerometer for movement sensing. The accelerometer is connected to an ear-set or in Helmet, which in turn, links to an Arduino UNO. This Arduino Uno is further connected to the relay circuit, which alters the course of the wheelchair relying upon it. The accelerometer functions on the X-Y axis, detecting forward, backward, left, or right head movements by changing its axis from the reference point.
The Arduino Uno sends signals to the motor driver based on the received Radio-Frequency Module signals. Interrupt signals are sent to the motor driver's pins, activating the motor and enabling the Wheel-Chair to move according to the detected head movements. Kumar & Vidhi (2014) A smart wheelchair utilizing two-dimensional head movements via accelerometers offers enhanced mobility for users with limited physical dexterity but may encounter challenges in accurately interpreting subtle head movements and distinguishing between intentional commands and unintentional gestures, potentially leading to navigation errors or frustration. Jhaand & Khurana (2016) Wheelchairs controlled by hand gestures allow users to move around without using their hands, however there may be issues with the accuracy and consistency of gesture recognition, which could cause navigational mistakes and annoyance for the user. Pande et al. (2014) MEMS-powered hand gesture-controlled wheelchairs provide hands-free functionality and accessibility, but they may have issues with inaccurate gesture recognition and sensitivity to external stimuli, which could result in inadvertent commands and decreased dependability. Anitha et al. (2019) Low cost head gesture controlled wheelchair for quadriplegic patients used a webcam for head motion identification. The Webcam will be placed before the patient in the wheelchair. When the patient tilts his head, the motion will be capture by the webcam and it will be processed by using Kanade Lucas Tomasi (KLT) algorithm. But, in this algorithm, there are some disadvantages namely, sensitive to lighting changes, sensitivity to variations in image texture, difficulty handling occlusions. In our paper, we used accelerometer ADXL335 to navigate the wheelchair through head. This paper will be majorly used to Tetraplegia patients. Tetraplegia refers that, the patients whose body is partially paralyzed. The neck portion and above the neck portion will be functioned normally. But, remaining portion will be paralyzed. If the patient feels that he has a pain in his neck, the other person will navigate the wheelchair by Bluetooth module. This paper also contains collision detection technique and the body temperature measurement is also done.
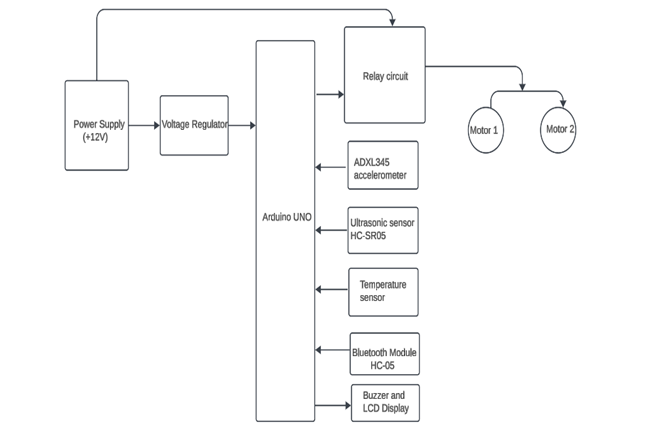
2. METHODOLOGY (WORK DESCRIPTION)
Figure 1
|
Figure 1 Block
Diagram of Head-Way Navigated Wheelchair |
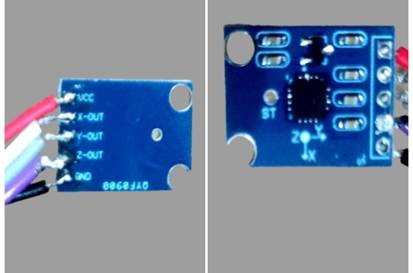
1) Accelerometer
(ADXL335):
Accelerometer ADXL335 is used for navigation purpose. It contains 3- axis in it. The ADXL335 accelerometer, made by Analog Devices, Inc., uses tiny structures to detect movement. These structures turn movement into electrical signals. After adjusting and converting these signals, they become digital data showing movement in three directions: left-right, up-down, and front-back. This data can be accessed using I2C or SPI connections, making it easy to use in many different things. People like it because it's really good at measuring movement, doesn't use much power, and is small. It's popular for things like phones, machines in factories, and scientific tools. In this paper, this accelerometer is used to sense the head movement of a patient who is on the wheelchair. The signal is then sent to the Arduino UNO for further process.
Figure 2
|
Figure 2 ADXL335
Accelerometer Sensor |
2) Arduino
UNO:
The Arduino Uno is a small computer that's easy to use and program. The Uno has many input and output pins, allowing you to connect sensors, buttons, motors, and more. It's powered by a USB cable or an external power supply, making it versatile for various working models. Overall, the Arduino Uno is a versatile and affordable tool for exploring the world of electronics and programming. All the signals from, accelerometer, Bluetooth module, Ultrasonic sensor and so on will reach Arduino for further process. The Arduino UNO is shown in Figure 3.
Figure 3

|
Figure
3 Arduino UNO |
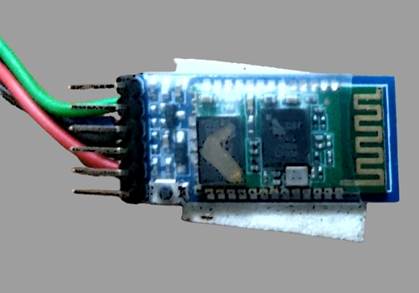
3) Bluetooth
Module:
The Bluetooth module HC-05 is a commonly used module for wireless communication based on the Bluetooth protocol. It allows devices to communicate with each other wirelessly over short distances, typically up to about 10 meters (or 33 feet). It is used to control the movements of wheelchair through mobile phone. If the patient feels neck pain, he can control the wheelchair by using his mobile phone. Firstly, we need to pair the Bluetooth module with our mobile phone. Then go to google play store and download “Arduino Blue Control” app. After downloading, we need to pair the device. And finally we can select the mode in which the wheelchair can be navigated. The Bluetooth module is shown in Figure 4.
Figure 4
|
Figure
4 Bluetooth Module |
4) Relay
module:
Relay module is simply an automatic switch. It is used to control the high torque motors which is connected in the wheels. It receives input signals from Arduino board and gives output in motors. The accelerometer will detect that in which direction the patient tilts his head and that signal is sent to the Arduino board and based on that, the relay will decide which wheel to rotate. Since, the high torque motors can be operated in 12V, this relay module is connected serially with 12V battery. Then all other blocks are connected with voltage regulator, which converts 12V DC power supply to 5V DC supply.
Figure 5

|
Figure 5 Relay Module |
5) LCD
Display:
The 16*2 LCD display is used to display the temperature of the patient, direction of wheelchair, and distance between the object and the wheelchair. It requires 5V supply. The output of temperature sensor, ultrasonic sensor is connected to the LCD Display.
Figure 6

|
Figure 6 16*2 LCD
Display |
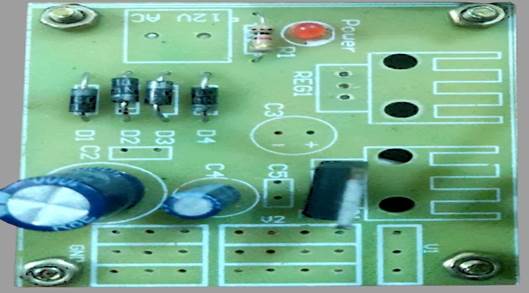
6) Voltage
Regulator:
A voltage regulator is an electronic component or circuit that maintains a constant output voltage regardless of variations in input voltage or load current. Its primary function is to stabilize and regulate the voltage supplied to electronic devices or circuits, ensuring they receive a consistent and reliable voltage within a specified range. In this paper, this voltage regulator is used to convert 12V to 5V. The 12V supply battery is connected serially to the high torque Geared DC motors. Because, the motor works in 12V power supply. Then the 5V supply is connected to the components which works by 5V namely Arduino UNO, Buzzer, LCD Display, Ultrasonic sensor, Temperature sensor, Accelerometer.
Figure 7
|
Figure 7 Voltage
Regulator |
7) Temperature
sensor:
A temperature sensor is a device or component that measures temperature and converts it into an electrical signal. It is placed on either sides of the wheelchair. When resistance value is decreased in this sensor, the temperature value will be increased.
Figure 8
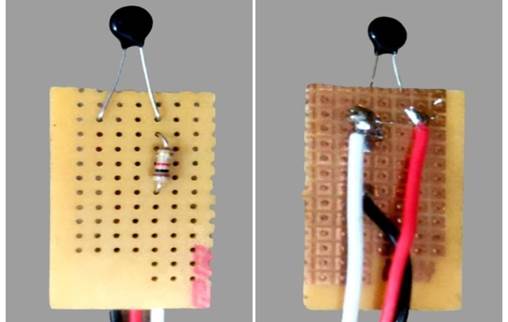
|
Figure 8 Temperature
Sensor |
3. RESULTS AND DISCUSSIONS
The HNW system was tested in a variety of real-world scenarios and performed admirably in each location. It had the ability to recognize impediments and swiftly alter its path to stay clear of them. Additionally, it continuously monitored the user's body temperature and sent data in real-time for analysis and, if needed, action. Users may effortlessly operate the wheelchair and change settings via Bluetooth. Its ease of use and practicality were reported by those who tested it, suggesting that it could improve the quality of life for people with "Tetraplegia" condition.
Figure 9

|
Figure 9 Output |
Figure 10
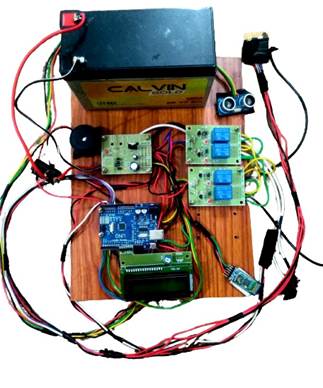
|
Figure 10 HWN Circuit |
Figure 11

|
Figure 11 HWN
Wheelchair |
Table 1
|
Table 1 Result |
|
|
COMPONENTS |
SUPPLIED VOLTAGE |
|
High Torque DC Motor |
11 to 12V DC |
|
ADXL335 |
1.8 to 3.6V |
|
Arduino UNO |
9V DC |
|
Thermistor |
0.25 to 5V |
|
Ultrasonic Sensor (HC-SR05) |
4.5 to 5.5V |
|
Buzzer |
1.5 to12V DC |
|
LCD Display |
4.7 to 5.3V |
4. CONCLUSIONS AND RECOMMENDATIONS
In simple terms, head movement-controlled wheelchairs are a big deal for people who have trouble getting around on their own. These wheelchairs use special technology that lets users move them just by moving their heads. This makes it easier for people with disabilities to get around without needing a lot of physical strength. By using head movements to control the wheelchair, it's like steering with your head instead of your hands. This makes it super easy and intuitive, so even people with severe disabilities can use them without much effort. These wheelchairs are a game-changer because they give people more independence and make their lives easier. Instead of relying on someone else to push them around, they can go wherever they want on their own terms. And the best part is, this technology is always getting better. As researchers keep working on it, we can expect even more cool features and improvements that will make these wheelchairs even more helpful and easy to use. Overall, head movement-controlled wheelchairs are a big step forward in making the world more accessible for everyone. They give people with disabilities the freedom to go where they want, when they want, and that's something to celebrate!
CONFLICT OF INTERESTS
None.
ACKNOWLEDGMENTS
None.
REFERENCES
Aleksandar, P., & Branko, D. (2013). Wheelchair Control by Head Motion. Serbian Journal of Electrical Engineering, 10(1), 1351.
Anitha, A., Dharshini, N., Raga Ravali, B., Chaurasia, S., Christina, G. (2019). Low Cost Head Gesture Controlled Wheelchair for Quadriplegic Patients. In: Hemanth, J., Fernando, X., Lafata, P., Baig, Z. (eds) International Conference on Intelligent Data Communication Technologies and Internet of Things (ICICI) 2018. ICICI 2018. Lecture Notes on Data Engineering and Communications Technologies, vol 26. Springer, Cham. https://doi.org/10.1007/978-3-030-03146-6_167
Gao, P., Luo, H., & Li, Y. (2023). Vision-Based Head Posture Control Wheelchair System Research. 2023 2nd International Symposium on Sensor Technology and Control (ISSTC), Hangzhou, China, 232-237. https://doi.org/10.1109/ISSTC59603.2023.10280784
Jhaand, P., & Khurana, P. (2016). Hand Gesture Controlled
Wheelchair, IJCTA, 9(41), 243-249.
Kumar, N., & Vidhi (2014). Two Dimension Head Movements Based Smart Wheel Chair Using Accelerometer. International Journal of Scientific Engineering and Research, 2(7), 9-11.
Kumar, S., Dheeraj, Neeraj, & Kumar, S. (2015). Design and Development of Head Motion Controlled WheelChair. International Journal of Advances in Engineering & Technology.
Pande, V.V., Ubale, N.S., Masurkar, D. P., Ingole, N. R., & Mane, P. P. (2014). Hand Gesture Based Wheelchair Movement Control for Disabled Person Using MEMS. Int. Journal of Engineering Research and Applications, 4(4) (Version 4).
Radhika, K., Ahmad, S. Z., Rehman, S. M., Javad, S. M., Revanth, S. S., & Nizam, S. (2023). A Realtime Head Movement Controlled Wheelchair for Paralyzed People. Turkish Journal of Computer and Mathematics Education (TURCOMAT), 14(2), 752–762. https://doi.org/10.17762/turcomat.v14i2.13730
Shaheen, S., & Umakeswari, A. (2013). Intelligent Wheelchair For People with Disabilities. International Journal of Engineering and Technology (IJET), 5(1), 391-397.
Srivastava, P., Chatterjee, S., & Thakur, R. (2014). Design and Development of Dual Control System Applied to Smart Wheelchair, Using Voice and Gesture Control. International Journal of Research in Electrical and Electronics Engineering (IASTER), 2(2), 01-09.
|
|
 This work is licensed under a: Creative Commons Attribution 4.0 International License
This work is licensed under a: Creative Commons Attribution 4.0 International License
© IJETMR 2014-2024. All Rights Reserved.