
|
|
|
|
NEURO-FUZZY INTELLIGENT CONTROLLER FOR LFC OF A FOUR-AREA POWER SYSTEM
Basavarajappa Sokke Rameshappa
1 ![]()
![]() , Nagaraj Mudakapla Shadaksharappa 1
, Nagaraj Mudakapla Shadaksharappa 1 ![]()
![]()
1 Department of Electrical and
Electronics Engineering, Bapuji Institute of
Engineering and Technology, Davanagere, VTU,
Belagavi, India
|
|
|
ABSTRACT |
|
|
In modern
complex power systems, the problem of automatic generation control arises due
to a sudden increase or decrease in load. This problem leads to instability
in the system if the frequency control is not automatic, which may finally
lead to system collapse. Hence, automatic control of frequency and tie-line
power is significant. This research paper develops and compares the
performance of an adaptive neuro-fuzzy inference system (ANFIS) controller
with the conventional PID controller and the Takagi-Sugeno-Kang
fuzzy logic controller for load frequency control (LFC) of a four-area power
system with generation rate constraint (GRC) on turbines. The performance is
compared in terms of errors, settling time and maximum undershoot of the
frequency deviation for different step load changes using Matlab.
The proposed ANFIS controller performs with less peak undershoot of - 0.7374
Hz and a settling time of 27.9823 sec at a 4% change in load. It reduces the
steady-state error to zero. Thus, the proposed controller is the most
suitable LFC in energy centers. The system parameters are taken from the IEEE
press, and EPRI published books. |
|||
|
Received 27 August 2022 Accepted 28 September 2022 Published 13 October 2022 Corresponding Author Basavarajappa Sokke Rameshappa, basavarajsr@gmail.com
DOI 10.29121/ijetmr.v9.i10.2022.1235 Funding: This research
received no specific grant from any funding agency in the public, commercial,
or not-for-profit sectors. Copyright: © 2022 The
Author(s). This work is licensed under a Creative Commons
Attribution 4.0 International License. With the
license CC-BY, authors retain the copyright, allowing anyone to download,
reuse, re-print, modify, distribute, and/or copy their contribution. The work
must be properly attributed to its author.
|
|||
|
Keywords: Automatic Load
Frequency Control, ANFIS Controller, Conventional Controller, Power System, Sugeno Fuzzy Logic Controller |
|||


1. INTRODUCTION
An automatic load
frequency control is essential to maintain system stability in complex power system
operations. It is possible by controlling the system frequency and the power
flows in tie-lines, which are at nominal values for small perturbations in
demand Kundur (1994). An automatic LFC in the power system
reduces the area control error (ACE). ACE is the summation of the tie-line
power and system frequency deviation. The speed changer position of the
governor is adjusted using a servo-motor mechanism in the secondary loop of the
control area. The drawbacks of conventional PID controllers are – slow response
and high undershoot/overshot in the ACE. Artificial Intelligent (AI)
controllers can overcome these drawbacks.
In Shaker et al. (2019), an adaptive LFC for a single area using ANFIS
and an artificial intelligence technique is employed. The genetic algorithm is
used to tune the PID controller. A three-area interconnected power system with
fuzzy logic self-tuned PID controller is employed for LFC problems. A
hybrid neuro-fuzzy-based ANFIS controller and robust fuzzy logic-based
fine-tuning approach are proposed for frequency control in a three-area
hydrothermal system Khezri et al. (2016). An ANFIS approach is proposed for LFC in a
multi-area power generation system, and its performance is compared with
conventional controllers Prakash and Sinha (2017). A distributed model predictive LFC for a
four-area hydrothermal power system is proposed. The controller is designed
based on optimal control theory Zhang et al. (2017). A multi-source power system's
automatic LFC with the ANFIS approach is presented considering GRCs and other
non-linearity Bhaskar et al. (2018).
The research work
in the literature employs hybrid techniques combining conventional and
artificial intelligent controllers without GRC to minimize the ACE. It also
employs predictive model control and ANFIS approach with GRC but does not
provide several epochs, optimization techniques, and dynamics of steam
turbines. Hence, the present research proposes an ANFIS controller that uses
ACE and the derivative of ACE to train the model for the LFC system with steam
turbine dynamics, GRC, hybrid, and backpropagation optimization techniques.
2. MATERIALS AND METHODS
2.1. DEVELOPMENT OF THE POWER SYSTEM MODEL
The dynamic mathematical models of various components of power plants were presented in IEEE: Power and Energy Society. (2013). For thermal plants, a governor's transfer function (TF) model is derived from the fundamental speed governor operation as given in Equation 1.
The TF models of a single reheat, tandem compound steam turbine, are obtained from the turbine dynamics as given in Equation 2, Equation 3, Equation 4, for the turbine, reheater, and crossover.
For a nuclear plant, the TF model of a speed governor is derived as given in Equation 5.
The TF models of a double reheat tandem compound steam turbine are obtained from the turbine dynamics as given in Equation 6, Equation 7, Equation 8, for the turbine, reheater, and crossover, respectively.
For a hydropower plant, the TF model of a hydro governor is derived as given in Equation 9.
The TF model of a hydro turbine [3] is obtained from the turbine dynamics, as given in Equation 10.
where ![]() =
hydro governor reset or washout time constant.
=
hydro governor reset or washout time constant. ![]() =
hydro governor temporary droop.
=
hydro governor temporary droop.
The presence of GRC in the system affects stability Sahin (2020). The GRCs for all areas are included by adding the limiters to the turbines. The alternator and load TF model is obtained from the Swing equation as given in Equation 11.
where ![]() =
mechanical power,
=
mechanical power, ![]() = electrical power, and
= electrical power, and ![]() = acceleration power.
= acceleration power.
Equation 11 can be written in the standard form is obtained as given in Equation 12.
![]() , for
i = 1, 2, 3, 4. Equation
12
, for
i = 1, 2, 3, 4. Equation
12
In the system operation, the power flow on the tie-lines is given in Equation 13.
The deviation in tie-line power flow is derived from the power angle equation as Equation 14
ACE is the error signal fed to the controller and is derived as, the combination of the change in tie-line power and system frequency, given in Equation 15.
![]() for i, j = 1, 2, 3, 4. Equation 15
for i, j = 1, 2, 3, 4. Equation 15
The integral of time-weighted absolute error (ITAE) is considered an objective function and is calculated as given in Equation 16.
![]() for
i, j = 1, 2, 3, 4. Equation 16
for
i, j = 1, 2, 3, 4. Equation 16
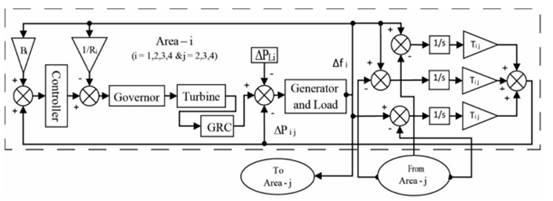
Figure 1 shows the connection of the various components of ith area in a four-area multi-source power system. This system comprises a hydro, a nuclear, and two thermal power plants.
Figure 1
|
Figure
1 Power System Model |
2.2. CONVENTIONAL
PID CONTROLLER
Ziegler and Nichols have suggested a
method to calculate the controller gain values. The values of critical gain ![]() and the critical
period
and the critical
period ![]() are used for calculation
of the gain values, as shown in Table 1, using the gain equations given below:
are used for calculation
of the gain values, as shown in Table 1, using the gain equations given below:
![]() Equation 17
Equation 17
![]() Equation 18
Equation 18
![]() . Equation 19
. Equation 19
Table 1
|
Table 1 PID
Controller Parameters |
|||||
|
Plant |
|
|
|
|
|
|
Thermal |
0.286 |
12.289 |
0.177 |
0.028 |
0.264 |
|
Nuclear |
0.181 |
19.137 |
0.109 |
0.012 |
0.261 |
|
Hydro |
0.112 |
16.885 |
0.067 |
0.008 |
0.142 |
2.3. SUGENO FUZZY LOGIC CONTROLLER
Takagi-Sugeno-Kang
proposed an approach for developing fuzzy rules from the given input-output
data. Sugeno fuzzy inference system (a knowledge or
rule-based) is used in this non-linear power systems with uncertainty. In this
controller, the inputs are fuzzifying and then applying the fuzzy operator, but
membership functions in the output are either constant or linear. A rule in the
Sugeno model consists of two inputs, error (p) and
derivative of error (q), and an output (r). This rule is given by
IF p is X and q is Y, THEN r is r = f
(p, q)
where X and Y are the linguistic
variables, and f (p, q) is a polynomial function of p and q.
The inference system is a zero-order
model if f (p, q) is a constant and is a first-order model if f (p, q) is a
linear function of p and q. Because each rule has a crisp output, the overall
output is obtained via the weighted average defuzzification method. The
defuzzification is done through the weighted average method. Table 2 shows the fuzzy associative memory (FAM) table to form
forty-nine rules with triangular membership functions, and the output function
is taken as a constant to obtain the fuzzy inference system (fis) file.
Table 2
|
Table 2 FAM Table |
||||||||
|
Rule
Bases |
Derivative
Error (DACE) |
|||||||
|
NB |
NM |
NS |
Z |
PS |
PM |
PB |
||
|
Error |
NB |
PB |
PB |
PM |
PM |
PS |
PS |
Z |
|
(ACE) |
NM |
PB |
PM |
PM |
PM |
PS |
Z |
Z |
|
NS |
PB |
PM |
PM |
PM |
Z |
NS |
NS |
|
|
Z |
PB |
PM |
PM |
Z |
NS |
NM |
NB |
|
|
PS |
PM |
PM |
NS |
NS |
NM |
NB |
NB |
|
|
PM |
PM |
PS |
NS |
NM |
NB |
NM |
NB |
|
|
PB |
NS |
NS |
NM |
NM |
NM |
NM |
NB |
|
2.4. ANFIS
CONTROLLER
It combines neural network and fuzzy logic algorithms to obtain a Sugeno-type fis file. It is designed using a hybrid learning rule with backpropagation. The gradient descent optimization method is used to obtain the training data. The two rules and five layers of the ANFIS structure are shown in Figure 2.
R1: IF x is ![]() &
y is
&
y is ![]() , THEN
, THEN ![]()
R2: IF x is ![]() &
y is
&
y is ![]() ,
THEN
,
THEN ![]()
where ![]() ,
, ![]() and
and ![]() ,
,![]() are the linguistic
variables.
are the linguistic
variables. ![]() ,
, ![]() ,
,![]() and
and![]() ,
, ![]() ,
,![]() are the consequent parameters.
are the consequent parameters.
The training data set is collected from Sugeno fuzzy logic controller outputs. This data is
uploaded in the anfis editor to generate the fis file. The grid partitioning technique with 5x5 gbell and linear type membership functions are used. The
generated fis file is used in training the data set
with hybrid and backpropagation optimization techniques for 20 epochs. The
process of training and testing the data is repeated until the error reduces to
![]() .
Generate the fis file with the gbell function for all four areas separately.
This file is used in the ANFIS controller to simulate the power system and get
the desired output.
.
Generate the fis file with the gbell function for all four areas separately.
This file is used in the ANFIS controller to simulate the power system and get
the desired output.
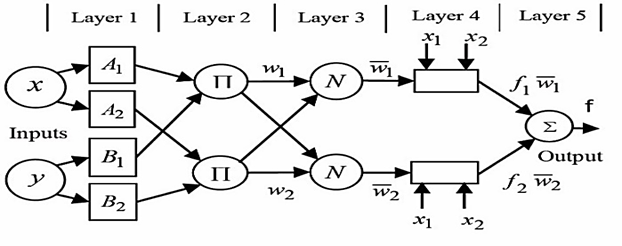 Figure 2
Figure 2
|
Figure
2 ANFIS
Architecture |
3. RESULTS AND DISCUSSIONS
The system parameters are given in
Appendix A at a nominal frequency ![]() of 50 Hz. The simulation
of a developed power system model is performed for each type of controller. The
simulation is carried out using Matlab. Consider the case with a 1% step load
increase simultaneously in all the areas (A1 to A4); the frequency deviation
of 50 Hz. The simulation
of a developed power system model is performed for each type of controller. The
simulation is carried out using Matlab. Consider the case with a 1% step load
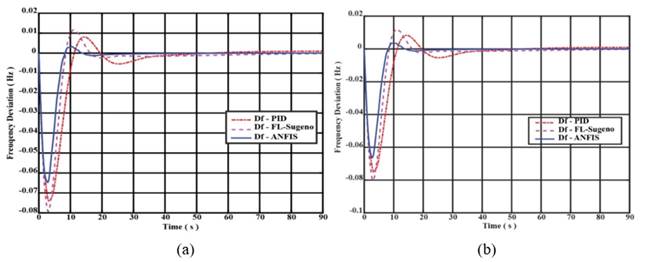
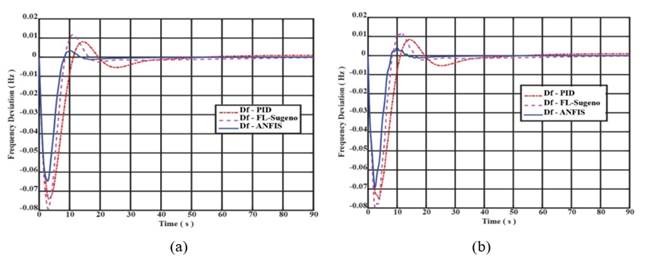
increase simultaneously in all the areas (A1 to A4); the frequency deviation ![]() with three types of
controllers is shown in Figure 3 and Figure 4. As the load increases, the speed decreases, and hence frequency
decreases.
with three types of
controllers is shown in Figure 3 and Figure 4. As the load increases, the speed decreases, and hence frequency
decreases.
Further, the speed increases due to the primary control action by the speed governor and the secondary control action by the ANFIS controller. This results in zero ACE deviation. It is evident from the simulation results that the proposed controller reduced the steady state error and improved the transient responses in terms of undershoot, settling time, and the smaller value of ITAE.
Figure 3
|
Figure
3 |
Figure 4
|
Figure
4 |
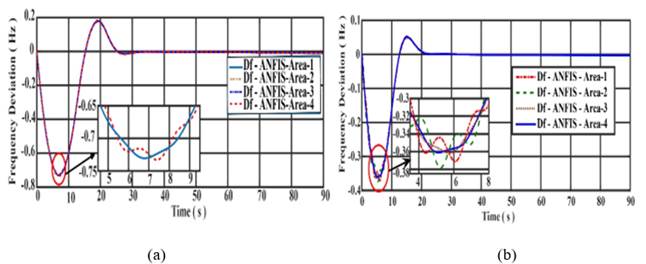
The step change in load ![]() from 1% to 4% in each area
is considered. The ITAE values and the step response characteristics,
undershoot
from 1% to 4% in each area
is considered. The ITAE values and the step response characteristics,
undershoot ![]() , and settling time
, and settling time ![]() , are measured in each case. Table 3 shows the comparative study of characteristics and error values
for each case. Figure 5 (a) shows the
, are measured in each case. Table 3 shows the comparative study of characteristics and error values
for each case. Figure 5 (a) shows the ![]() with ANFIS controller
under 4% step load change (equal load). The transient specifications are the
settling time of 27.9823 sec (min) and undershoot of - 0.7374 Hz (min) with an
ITAE value of 1.541, which are measured. These specifications are acceptable
and smaller compared to conventional controllers. Figure 5 (b) shows the
with ANFIS controller
under 4% step load change (equal load). The transient specifications are the
settling time of 27.9823 sec (min) and undershoot of - 0.7374 Hz (min) with an
ITAE value of 1.541, which are measured. These specifications are acceptable
and smaller compared to conventional controllers. Figure 5 (b) shows the ![]() with ANFIS controller
under
with ANFIS controller
under ![]() in each area. Its dynamic
response is good with a very minimum steady.
in each area. Its dynamic
response is good with a very minimum steady.
Table 3
|
Table 3 Settling Time, Maximum
Undershoot and ITAE of
Frequency Deviation |
||||||||||
|
Load |
Controllers |
Settling Time (sec) |
Maximum Undershoot (Hz) |
ITAE |
||||||
|
|
|
A1 |
A2 |
A3 |
A4 |
A1 |
A2 |
A3 |
A4 |
|
|
+1 % |
PID |
37.4276 |
37.0483 |
37.4279 |
36.7415 |
-0.0741 |
-0.0752 |
-0.0741 |
-0.0749 |
0.1128 |
|
|
Fuzzy |
35.3831 |
24.1459 |
35.3825 |
23.7027 |
-0.0793 |
-0.0802 |
-0.0793 |
-0.0798 |
0.0903 |
|
|
ANFIS |
12.5448 |
12.6491 |
12.5449 |
12.2472 |
-0.0647 |
-0.0664 |
-0.0647 |
-0.0692 |
0.0255 |
|
+2 % |
PID |
31.4877 |
31.4790 |
31.4883 |
31.3404 |
-0.2334 |
-0.2341 |
-0.2334 |
-0.2358 |
0.3229 |
|
|
Fuzzy |
18.4069 |
18.3627 |
18.4069 |
18.3300 |
-0.2346 |
-0.2352 |
-0.2346 |
-0.2378 |
0.2314 |
|
|
ANFIS |
16.2255 |
16.2110 |
16.2255 |
15.8983 |
-0.2289 |
0.2289 |
0.2289 |
-0.2333 |
0.3635 |
|
+3 % |
PID |
25.8549 |
25.7815 |
25.8546 |
25.8021 |
-0.4649 |
-0.4649 |
-0.4649 |
-0.4714 |
0.8842 |
|
|
Fuzzy |
21.8765 |
21.8081 |
21.8767 |
21.7396 |
-0.4647 |
-0.4648 |
-0.4647 |
-0.4713 |
0.7378 |
|
|
ANFIS |
20.8092 |
20.6850 |
20.8092 |
20.7816 |
-0.4606 |
-0.4606 |
-0.4606 |
-0.4682 |
0.8374 |
|
+4 % |
PID |
48.2282 |
48.7783 |
48.2355 |
47.6003 |
-0.7440 |
-0.7440 |
-0.7440 |
-0.7503 |
1.9070 |
|
|
Fuzzy |
39.8828 |
57.6070 |
39.8753 |
39.8705 |
-0.7424 |
-0.7424 |
-0.7424 |
-0.7497 |
2.0750 |
|
|
ANFIS |
28.0254 |
29.2096 |
27.9823 |
28.9171 |
-0.7374 |
-0.7374 |
-0.7374 |
-0.7426 |
1.5410 |
Figure 5
|
Figure
5 |
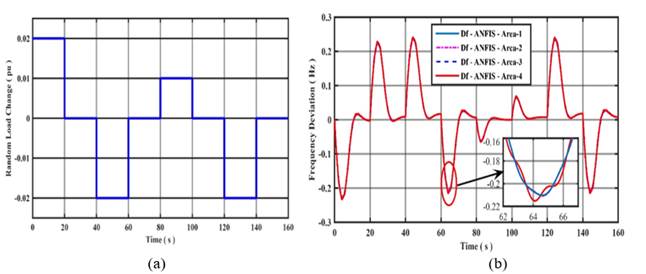
The robustness of the ANFIS controller with a random load
curve, as shown in Figure 6 (a), is assessed for all four areas, and the frequency
deviations (![]() are shown in Figure 6 (b). It is observed that the ANFIS controller exactly tracks
the load curve as the load increases the system frequency decreases. It matches
the generation with load demand and losses at a constant frequency. For the
case with an equal change in load, frequency deviation occurs in the respective
areas which are less than the threshold value.
are shown in Figure 6 (b). It is observed that the ANFIS controller exactly tracks
the load curve as the load increases the system frequency decreases. It matches
the generation with load demand and losses at a constant frequency. For the
case with an equal change in load, frequency deviation occurs in the respective
areas which are less than the threshold value.
For the system with the proposed ANFIS controller, the
values of ![]() and
and ![]() at a 3% change in load, these values are -
0.4606 Hz (min) and 20.6850 sec (min), respectively. For a 2% change in load,
these values are - 0.2289 Hz (min) and 15.8983 sec (min), respectively, and at
a 1% change in load, these values are further reduced to - 0.0647 Hz (min) and
12.2472 sec (min), respectively. Thus, the obtained time response
characteristics are smaller compared to the values given in the literature by
Deepesh Sharma (2020) and Feng Liu (2017). Hence, the proposed ANFIS controller
is more effectively tuned with GRCs than PID and FL controllers.
at a 3% change in load, these values are -
0.4606 Hz (min) and 20.6850 sec (min), respectively. For a 2% change in load,
these values are - 0.2289 Hz (min) and 15.8983 sec (min), respectively, and at
a 1% change in load, these values are further reduced to - 0.0647 Hz (min) and
12.2472 sec (min), respectively. Thus, the obtained time response
characteristics are smaller compared to the values given in the literature by
Deepesh Sharma (2020) and Feng Liu (2017). Hence, the proposed ANFIS controller
is more effectively tuned with GRCs than PID and FL controllers.
Figure 6
|
Figure
6 (a) Random Load Curve and (b) |
4. CONCLUSIONS
This research article is presented to assess the effectiveness of an ANFIS controller in four control areas with different sources connected through tie-lines. Transient analysis is carried out, considering the tandem compound TF models of steam turbines and the nonlinearity of GRC under equal and unequal loads. The Z-N method is employed to tune the controller gains and minimize the value of ITAE. The simulation of the model for an equal change in load shows that the proposed ANFIS controller provides a very significant improvement. Its dynamic step responses have smaller values of specifications compared to conventional and fuzzy logic controllers. The proposed controller is robust and quickly adaptable to nonlinearity in the system. Also, this work shows that the ANFIS controller performs very effectively even under random demand changes, and thus the power system stability is achieved.
5. NOMENCLATURE
![]() :
Power system rated capacity,
:
Power system rated capacity, ![]() :
Nominal load,
:
Nominal load, ![]() :
Tie-line power,
:
Tie-line power, ![]() :
Load damping constant,
:
Load damping constant, ![]() :
Frequency bias factor,
:
Frequency bias factor, ![]() :
Inertia constant,
:
Inertia constant, ![]() :
Governor speed regulation,
:
Governor speed regulation, ![]() : Nominal frequency,
: Nominal frequency, ![]() :
Frequency deviation,
:
Frequency deviation, ![]() :
Power angle,
:
Power angle, ![]() :
Synchronizing torque co-efficient,
:
Synchronizing torque co-efficient, ![]() :
Power system gain,
:
Power system gain, ![]() :
Power system, Governor, Turbine, Reheater, Crossover time constants,
respectively,
:
Power system, Governor, Turbine, Reheater, Crossover time constants,
respectively, ![]() ,
,
![]() ,
,![]() ,
,
![]() : Fraction
of turbine power at HP, LP, IP and VHP sections respectively,
: Fraction
of turbine power at HP, LP, IP and VHP sections respectively, ![]() :
Turbine water starting time constant,
:
Turbine water starting time constant, ![]() :
Hydro governor reset time constant,
:
Hydro governor reset time constant, ![]() :
Hydro governor temporary droop,
:
Hydro governor temporary droop, ![]() :
Hydro governor permanent droop.
:
Hydro governor permanent droop.
6. SYSTEM PARAMETERS
![]() =
2000MW,
=
2000MW, ![]() =
1000MW,
=
1000MW, ![]() =
200MW,
=
200MW, ![]() = 2.5Hz/pu MW,
= 2.5Hz/pu MW,
![]() = 30deg.,
= 30deg., ![]() =
0.0866.
=
0.0866.
For thermal plant: ![]() = 0.01pu MW/Hz,
= 0.01pu MW/Hz, ![]() = 0.41pu MW/Hz,
= 0.41pu MW/Hz, ![]() = 5MJ/MVA,
= 5MJ/MVA, ![]() =
0.2sec,
=
0.2sec,
![]() =
0.3sec,
=
0.3sec, ![]() =
7sec,
=
7sec, ![]() =
0.4sec,
=
0.4sec, ![]() =
0.3,
=
0.3,
![]() =
0.4,
=
0.4, ![]() = 0.3,
= 0.3, ![]() =
100Hz/pu MW,
=
100Hz/pu MW,
![]() =
20sec. GRC =
=
20sec. GRC = ![]()
For nuclear plant: ![]() = 0.01pu MW/Hz,
= 0.01pu MW/Hz, ![]() = 0.41pu MW/Hz,
= 0.41pu MW/Hz, ![]() = 5MJ/MVA,
= 5MJ/MVA, ![]() =
0.2sec,
=
0.2sec,
![]() =
0.3sec,
=
0.3sec, ![]() =
7sec,
=
7sec, ![]() =
0.4sec,
=
0.4sec, ![]() =
0.22,
=
0.22,
![]() =
0.56,
=
0.56, ![]() = 0.22,
= 0.22, ![]() =
100Hz/pu MW,
=
100Hz/pu MW, ![]() =
20sec.
=
20sec.
For hydro plant: ![]() = 0.015pu MW/Hz,
= 0.015pu MW/Hz, ![]() = 0.415pu MW/Hz,
= 0.415pu MW/Hz, ![]() = 4MJ/MVA,
= 4MJ/MVA, ![]() =
10sec,
=
10sec,
![]() =
1sec,
=
1sec, ![]() =
5sec,
=
5sec, ![]() =
0.2875Hz/pu MW,
=
0.2875Hz/pu MW, ![]() =
0.05Hz/pu MW,
=
0.05Hz/pu MW, ![]() =
66.6667Hz/pu MW,
=
66.6667Hz/pu MW,
![]() =
10.6667s. GRC =
=
10.6667s. GRC = ![]() and
and ![]() .
.
CONFLICT OF INTERESTS
None.
ACKNOWLEDGMENTS
The authors are grateful to the Principal of Bapuji Institute of Engineering and Technology, Davanagere, Karnataka, for their support, encouragement, and facilities in carrying out this research.
REFERENCES
Bhaskar,M. K., Pal, N.S. and
Yadav, V. K. (2018). A Comparative Performance Analysis of Automatic
Generation Control of Multi-Area Power System Using PID, Fuzzy And ANFIS
Controllers, IEEE International Conference on Power Electronics, Intelligent
Control, and Energy Systems, Delhi, India, 132-137, 2018. https://doi.org/10.1109/ICPEICES.2018.8897477.
Chandrakala, K.R.M.V. and Balamurugan.S. (2018). Adaptive Neuro-Fuzzy Scheduled Load Frequency Controller for Multi-Source Multi Area System Interconnected Via Parallel AC-DC Links, International Journal on Electrical Engineering and Informatics, 10(3), 479-490. https://doi.org/10.15676/ijeei.2018.10.3.5.
IEEE : Power and Energy Society. (2013). Technical Report on Dynamic Models
for Turbine-Governors in Power System Studies, Power System Dynamic Performance Committee, PES-TR1.
Khezri, R., Golshannavaz, S., Shokoohi, S. and Bevrani, H. (2016). Fuzzy Logic Based Fine-Tuning Approach for Robust Load Frequency Control in a Multi-Area Power System, Electric Power Components and Systems, Taylor and Francis Group, 44(18), 2073–2083. https://doi.org/10.1080/15325008.2016.1210265.
Liu, F., Wang, H., Shi, Q., Wang, H., Zhang, M. and Zhao, H. (2017). Comparison of an ANFIS and Fuzzy PID Control Model for Performance in a Two-Axis Inertial Stabilized Platform, IEEE Access, 5, 12951-12962. https://doi.org/10.1109/ACCESS.2017.2723541.
Kundur. P. (1994). Power System Stability and Control, Vol. 2, New York, McGraw-Hill.
Prakash, S. and Sinha, S. K. (2017). Automatic Load
Frequency Control of Six Areas Hybrid Multi-Generation Power Systems using
Neuro-Fuzzy Intelligent Controller, IETE Journal of Research, 64(4), 471-481. https://doi.org/10.1080/03772063.2017.1361869.
Sahin, E. (2020). Design of an Optimized Fractional High Order Differential Feedback Controller for Load Frequency Control of a Multi-Area Multi-Source Power System with Nonlinearity, IEEE Access, 8, 12327-12342. https://doi.org/10.1109/ACCESS.2020.2966261.
Shaker, H. K., Zoghby, H.E., Bahgat, M. E. and
Abdel-Ghany, A. M.(2019). Advanced Control Techniques for an
Interconnected Multi Area Power System for Load Frequency Control,
International Conf. on Middle East Power Systems, Tanta University, Egypt,
710-715. https://doi.org/10.1109/MEPCON47431.2019.9008158.
Sharma,
D. (2020). Automatic Generation Control of Multi-Source Interconnected
Power System using Adaptive Neuro-Fuzzy Inference System, International Journal
of Engineering, Science and Technology, 12(3), 66-80. https://doi.org/10.4314/ijest.v12i3.7.
Sharma, D., Pandey, K., Kushwaha ,V. and Sehrawat, S. (2016).
Load Frequency Control of Four-Area Hydro-Thermal Interconnected Power System
through ANFIS Based Hybrid Neuro-Fuzzy Approach, International Innovative
Applications of Computational Intelligence on Power, Energy and Controls with
their Impact on Humanity, 144-149. https://doi.org/10.1109/CIPECH.2016.7918755.
Zhang,Y., Liu, X. and Qu, B. (2017). Distributed Model Predictive Load Frequency Control of Multi-Area Power System with DFIGs, IEEE/CAA Journal of Automatica Sinica, 4(1), 125-135. https://doi.org/10.1109/JAS.2017.7510346.
|
|
 This work is licensed under a: Creative Commons Attribution 4.0 International License
This work is licensed under a: Creative Commons Attribution 4.0 International License
© IJETMR 2014-2022. All Rights Reserved.