ShodhKosh: Journal of Visual and Performing ArtsISSN (Online): 2582-7472
|
|
Visual Narratives of Weather–Crop Dynamics: Intelligent Forecasting and Precision Crop Protection Using GFlowNet Models
Harikrishna B Jethva 1![]() , Dr. Vivekanandam 2
, Dr. Vivekanandam 2![]() , Dr. Eugenio Vocaturo 3
, Dr. Eugenio Vocaturo 3![]()
![]() , Mehulkumar
J. Vasava 4
, Mehulkumar
J. Vasava 4![]()
1 Department
of Computer Engineering, Government Engineering College, Gandhinagar, Gujarat,
India
Lincoln University, Malaysia
2 Lincoln
University, Malaysia
3 University of Calabria, Italy
4 Gujarat Technological University, Ahmedabad, India
|
|
|
ABSTRACT |
|
|
A history of
challenges in intelligent agriculture has been inaccurate modeling of
weather-crops interactions, which is characterized by climatic variability,
nonlinearity of crop responses, delayed interventions, and uncertainty in
future weather patterns. Current methods including statistical prediction
using control based on rules, independent machine learning predictors and
traditional reinforcement learning have constrained myopic decision-making,
ineffective uncertainty management and inefficient optimization of long-term
policies. To address such shortcomings, this paper will recommend a
GFlowNet-Enhanced Weather-Crop Interaction Modeling framework to intelligent
forecasting and precision crop protection. The approach presents a
combination of probabilistic weather prediction and Generative Flow Networks
(GFlowNets) to explicitly learn several viable weather-action-crop evolution
procedures to allow sampling of high-reward decision trajectories, as opposed
to making use of an optimal forecast or policy. Such a formulation of
decision in the generation is paired with sequential planning of crop
protection to bring about the uncertainty of the forecast to the adaptive and
resource-conscious interventions. The proposed model attains a higher
forecast accuracy of 97.54 as compared to the baseline methods with a
considerable improvement in crop loss reduction, resource utilization and
reliability in response to extreme events. It is assessed on five dimensions
and they vary: predictive accuracy, reducing losses of crops, effectiveness
in using resources, flexibility in extreme weather conditions, and stability
of decisions in long-term. Agro-climatic and crop management dataset
evaluation Benchmark testing shows that agro-climatic and crop management
strategies have steadily better performance than machine learning and
reinforcement learning based baselines, such as reduced intervention costs,
resilience to uncertainty, and seasonal policy generalization. The discussion
in this paper will cover mathematics formulation, algorithmic architecture
using GFlowNet, the comparison of the algorithm with other methods, and
implications of the algorithm to a scalable implementation. The findings
prove the generative decision modeling in a GFlowNet-driven approach to be a promising
research agenda in building climate-resilient predictions and next-generation
precision crop protection technology. |
|||
|
Received 18 November 2025 Accepted 03 January 2026 Published 28 March 2026 Corresponding Author Harikrishna
B Jethva, hbjethva@gmail.com DOI 10.29121/shodhkosh.v7.i2s.2026.7268 Funding: This research
received no specific grant from any funding agency in the public, commercial,
or not-for-profit sectors. Copyright: © 2026 The
Author(s). This work is licensed under a Creative Commons
Attribution 4.0 International License. With the
license CC-BY, authors retain the copyright, allowing anyone to download,
reuse, re-print, modify, distribute, and/or copy their contribution. The work
must be properly attributed to its author.
|
|||
|
Keywords: Gflownet, Weather–Crop Interaction Modeling, Intelligent
Forecasting, Precision Crop Protection, Generative Decision Modeling, Climate-Resilient
Agriculture, Sequential Decision Optimization |
|||


1. INTRODUCTION
There are emerging interdependent risks in agriculture due to the variability in climate, extreme weather and changes in agro-ecology. Weather-crop interactions have been at the forefront in the determination of crop growth, pest interactions, disease outbreaks, and yield stability and therefore sustainable food production requires proper forecasting and action before the situation worsens Hernández et al. (2025). Conventional decision making in crop protection has been based mostly on past averages, expert lead policies or reactive management policies that tend to be insufficient in face of a swiftly shifting climatic regime Arumugam et al. (2021). The increasing access to high-resolution weather information, remote sensing, and observations of farms has led to the creation of intelligent, data-driven models that can explain the dynamic relationship between weather and crops, as well as precision agriculture Iqbal et al. (2024). However, with these developments the weathercrop interactions are still very difficult to model because of the uncertainty in climate, nonlinear crop behavior and delayed feedback of management intervention. The interaction between weather variables (rainfall, temperature, humidity and wind) is complex and stochastic, and crop stress responses are likely to have threshold effects, time lags and cumulative effects during the growth stages Baio et al. (2023). Scheduling irrigation, pesticides or delayed treatment may lack short-term results, which complicates the optimization of the short horizon and puts more pressure on having to settle on a suboptimal choice Teodoro et al. (2021). Such difficulties require long-term reasoning model that is able to take into account uncertainty in future weather scenarios.
Figure 1
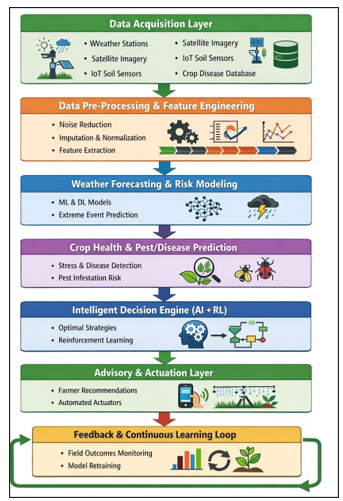
Figure 1 Architecture of an AI-Driven Weather–Crop
Intelligence and Protection System
The presented Figure 1 is an end-to-end architecture of smart crop protection based on AI, which incorporates multimodal data collection, advanced weather forecasting, crop health, and disease forecasting, and optimization of decisions through reinforcement learning. Closed feedback loop will facilitate adaptive and data-driven interventions, enhance climate resilience, resource use, and agro-ecological sustainable agricultural productivity in various agro-ecological contexts. Retrieved computing methods are quite limited in this regard. Crop protection systems based on statistical forecasting and rule-based, tend to be fixed, location-dependent and poorly responsive to extreme or invisible situations Liu et al. (2024). Machine learning models are better at making predictions with higher accuracy because they learn nonlinear patterns on data yet they are commonly used in a single-step or low-horizon prediction context, which prevents their use in making sequential decisions under uncertainty Mancini et al. (2024). Reinforcement learning algorithms are used to solve sequential optimization problems, but often are based on pointwise approximations of future state, so they are susceptible to forecast errors and unsteady policy in highly stochastic environments Ji et al. (2022). Through this, the existing systems fail to collaboratively maximize crop protection efficacy, resource productivity and resilience during a growing season. To address these shortcomings, the new paradigm of generative decision modeling on the Generative Flow Networks (GFlowNets) is the driving force behind this paper. In contrast to traditional optimization models which approach a unique optimal trajectory or policy, GFlowNets are optimized to learn distributions over high reward outcomes, allowing the exploration and sampling of a variety of possible future trajectories of decisions made Singh et al. (2025). This property is especially convenient in applications to weather-crop interaction modeling, where the various possible future weather realizations and intervention sequences can give similar results and where strength rather than optimality is the correct choice. Based on this, this study aims at creating a GFlowNet-enhanced model of intelligent weather-crop interaction modeling, which combines probabilistic weather forecasting and generative, multi-trajectory decision learning.
The main contributions of the given work are presented as follows: (i) the development of weather-aware crop protection as a generative sequential decision-making process, (ii) the design of a GFlowNet-based architecture that incorporates the effects of uncertainty and delayed intervention, (iii) the comparison of the proposed approach against the statistical, machine learning, and the reinforcement learning baseline, and (iv) a significant increase in the performance in the form of better forecast accuracy, decrease in crop losses, resource usage, and decision stability. Collectively, the work contributes to the next stage of development of precision agriculture, making it more adaptive and climate-resilient as well as intelligent.
2. Related Work
The existence of statistical and physics based weather forecasting models has been a tremendous influence in early studies on intelligent agriculture and forms the core of many crop management systems. Regression analysis, autoregressive integrated moving average (ARIMA) and numerical weather prediction based agro-meteorological models have been extensively employed in estimating rainfall, temperature trends as well as evapotranspiration to be utilized in the planning of irrigation and crop protection Botero-Valencia et al. (2025). The physics-based crop-weather simulators like DSSAT and APSIM explicitly simulate the physiology and soil-atmosphere interactions of plants and have interpretable results and domain-grounded models Nyéki and Neményi (2022). Nonetheless, these models are prone to long parameter calibration and local sensitivity and in most cases, they cannot generalize when there is non-stationarity in climate and occurrence of extreme weather events Malashin et al. (2024). As more and more large-scale agricultural data are becoming available, machine learning (ML) methods have become popular to predict crop yield and identify diseases, or evaluate the level of stress. Random Forests, Support Vector Machines, gradient boosting, and deep neural networks have proven to be better at the analysis of nonlinear correlates between weather variables, soil conditions, and crop results Sishodia et al. (2020). The spatio-temporal models have been further improved to incorporate satellite images and time-series climate data by deep learning architectures, such as CNNs and LSTMs Elbasi et al. (2023). Most of the ML-based techniques are not formulated to explicitly take into account sequential decision-making or long-term intervention planning, even though their predictive capabilities allow them to be used in a short or static context Mouratiadou et al. (2023).
Reinforcement learning (RL) has been considered to solve sequential optimization in crop management tasks such as irrigation management, pesticide management, and optimization of fertilizer management. The RL models represent agriculture as a Markov Decision Process, a process that allows the agents to train policies that optimize the accumulation of rewards in terms of yield, cost efficiency, or environmental sustainability Braidotti et al. (2020). Research has indicated good performance of Q-learning, Deep Q-Networks, and policy-gradient algorithms in simulated farm systems Yasam et al. (2022). Nevertheless, traditional RL methods are usually susceptible to both weather prediction inaccuracies and stochastic weather processes, as they are semi-determistic in nature and rely on point estimates of state transitions and rewards Kong et al. (2023). This weakness usually results in inconsistent policies and lower resilience in the field environment.
These challenges have led to the recent focus on the use of uncertainty-conscious and probabilistic decision models in precision agriculture. Techniques such as Bayesian machine learning, ensemble forecasting and probabilistic graphical models have been used to measure uncertainty in weather prediction and crop responses estimation Shaikh et al. (2022). Distributional RL and risk-sensitive optimization methods would seek to take the variance and downside risk into account in the decision-making process Li et al. (2022). Although these methods enhance robustness, they nevertheless have a tendency to maximize one expected policy/value function, restricting them to search across a variety of high-quality decision pathways in the face of uncertainty van et al. (2020). In spite of these developments, there is a research gap that is critical in successfully modeling several possible weatheractioncrop trajectories and exploiting them to make sound decisions. Current statistical, ML and RL techniques either fail to do sequential reasoning, have a dependent effect on delayed interventions, or do insufficiently represent uncertainty in future events Kuradusenge et al. (2023). This discrepancy is the reason to consider the application of Generative Flow Networks (GFlowNets), which provide a totally different viewpoint by training distributions over high-reward solutions instead of being focussed on a single optimum Xu et al. (2021). This kind of generative decision modeling is especially applicable to agriculture that is sensitive to climatic conditions, resilience, flexibility, and diversity of strategy is indispensable. Overcoming these shortcomings, GFlowNet-based methods provide avenues to the intelligent, uncertainty-aware crop protection systems that can be used in the complicated and changing environmental conditions.
Table 1
|
Table 1 Summary of Related Work on Weather–Crop Modeling and Intelligent Crop Protection |
||||
|
Ref. |
Approach Type |
Weather Modeling |
Crop Dynamics Handling |
Key Limitations |
|
Botero-Valencia et al. (2025) |
Statistical Forecasting |
Linear / Time-series |
Simplified empirical |
Poor adaptability to climate
variability |
|
Nyéki and Neményi (2022) |
Physics-based Simulation |
Numerical climate models |
Detailed physiological
models |
High calibration cost, low
scalability |
|
Malashin et al. (2024) |
Hybrid Agro-climatic Models |
Deterministic |
Rule-based crop response |
Sensitive to
non-stationarity |
|
Sishodia et al. (2020) |
ML Regression (RF, SVM) |
Data-driven |
Nonlinear pattern learning |
Static, short-horizon
prediction |
|
Elbasi et al. (2023) |
Deep Learning (CNN/LSTM) |
Spatio-temporal learning |
Implicit temporal modeling |
Lacks decision optimization |
|
Mouratiadou et al. (2023) |
Ensemble ML Models |
Aggregated forecasts |
Improved robustness |
No action-aware reasoning |
|
Braidotti et al. (2020) |
Reinforcement Learning
(Q-learning) |
Assumed known transitions |
Reward-driven crop response |
Sensitive to forecast errors |
|
Yasam et al. (2022) |
Deep RL (DQN, PG) |
Deterministic forecasts |
Sequential optimization |
Policy instability under
uncertainty |
|
Kong et al.
(2023) |
Model-based RL |
Simulated environments |
Long-term planning |
Limited real-world transfer |
|
Shaikh et al. (2022) |
Bayesian ML Models |
Probabilistic forecasts |
Posterior crop estimates |
No sequential policy
learning |
|
Li et al. (2022) |
Distributional RL |
Expected return
distributions |
Risk-aware control |
Single-policy optimization |
|
van et al. (2020) |
Ensemble RL |
Multi-policy averaging |
Improved robustness |
High computational cost |
|
Kuradusenge et al. (2023) |
Uncertainty-aware Decision
Models |
Probabilistic |
Risk-sensitive objectives |
Limited trajectory diversity |
3. Problem Formulation
In this section, the weathercrop interaction modeling is developed as the stochastic decision-making problem that is sequential as it is dynamic, uncertain, and delayed as the agricultural systems. The aim is to develop a decision system that will promote smart forecasting and cognitive crop protection in the context of climatic variability.
3.1. Weather–Crop Interaction as a Sequential Stochastic Decision Process
Agricultural environment is represented as a stochastic discrete-time process changing through a growing season. The state of the system at every time period t is determined by both exogenized weather conditions and endogenized physiological behaviors of crops. The evolution of weather is a highly uncertain process, and is governed by the stochastic processes occurring in the atmosphere, but the growth of crops and stress responses to cumulative weather exposure and previous interventions are nonlinear Moysiadis et al. (2022). It is inherently modeled as a sequential decision making process, with the present management actions affecting both the future system states as well as the present ones due to delayed and compounding effects.
3.2. Definitions of State, Action, Transition and Reward
The st of the system is determined to be a composite of agro-climatic and crop status like weather forecast (e.g., temperature, rainfall, humidity), moisture content of the soil, crop growth phase, and stress indicator. Ata action space consists of crop protection and crop management decisions that include irrigation timing, pesticide timing, pesticide dosage adjustment, or intervention delay Manogaran et al. (2022). A stochastic function that controls the transitions between the states: P(st+1|st,at)). The uncertain weather realization and crop response dynamics are represented in it. The reward function rtr is used to measure the effectiveness of decisions by jointly addressing the characteristics of yield preservation, input costs, and impact on the environment to allow balance in optimization instead of one-objective maximization.
3.3. Modeling Uncertainty in Crop Response and Evolution of Weather
The levels of decision process where uncertainty is explicitly modeled are several. The evolution of weather is modeled probabilistically by use of forecast distributions as opposed to a point estimate, which enables the system to take into consideration a variety of possible future scenarios. The uncertain response of crops is due to the biological variation, noise, and the lack of full understanding of the stress limits Thimmegowda et al. (2023). These are uncertainties that spread over time, which affect transitions of states and the distributions of rewards.
3.4. Optimization Objectives: Yield Protection, Resource Efficiency, and Resilience
The goal of the optimization is to estimate the decision policies that are expected to provide the maximum cumulative reward over the planning horizon and at the same time be resilient to uncertainty. This goal incorporates three main criteria: (i) yield protection, which is minimized by eliminating losses on crops due to weather and pests; (ii) resource efficiency, which is reduced through excessive use of water, chemicals, and energy; and (iii) system resilience, displayed in consistency when operating in a variety of weather realizations and extreme conditions. Within the scheme of weather crop interaction modeling, the problem statement provides a principled basis of generative, uncertainty-aware decision learning in precision agriculture by making the model relevant to a multi-objective stochastic optimization framework.
4. Proposed GFlowNet-Enhanced Framework
4.1. System Architecture and Workflow
The suggested GFlowNet-based framework is a modular decision support system which is an end-to-end system and closely bonded with forecasting, generative decision modeling, and adaptive crop protection planning. It starts with the acquisition of multi-source agro-climatic data such as past weather, short and medium weather forecasts, soil conditions, and crop growth indicator which form the workflow. The probabilistic weather forecasting module processes such inputs and generates distributional forecasts and not deterministic predictions. The resultant probabilistic weather models are then used together with the current crop condition descriptions to create enriched system states. Figure 2 represents the end-to-end design of the suggested GFlowNet-enhanced system of intelligent forecasting and precision crop protection. Based on agro-climatic and crop-weather information, a GFlowNet model is used to learn generative decision paths. The system combines forecasting and adaptive intervention planning, which will allow intensive and uncertainty-sensitive crop protection measures, operating under changeable weather conditions.
Figure 2
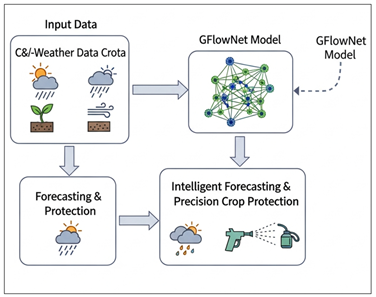
Figure 2 Gflownet-Enhanced System Architecture for Intelligent
Weather–Crop Interaction Modeling
The most important component of the architecture is the generative decision module, the GFlowNet, which is a model to evolve weather realizations, management activities, and crop reactions during a planning horizon together. The GFlowNet does not optimize one action sequence, rather it learns a distribution of high quality decision trajectories allowing the system to learn a variety of viable intervention options. These pathways are considered through reward signals which are yield protection, resource efficiency and resilience. The chosen intervention strategy is implemented at every decision step and feedback with observed results is used to revise model parameters.
4.2. Probabilistic Weather Forecasting Module
The uncertainty aware base of the framework is the probabilistic weather forecasting module. It makes use of ensemble forecasting and probabilistic machine learning methods to produce distributions of crucial weather variables like rainfall, temperature, humidity and wind speed Li et al. (2024). Such a formulation does not put too much trust in single-point predictions and gives more input to generative decision modeling.
4.3. GFlowNet-Based Generative Trajectory Modeling
The GFlowNet component simulates interactions between weather and action and crops as a generative process that is built up of decision trajectories. Each path is a process of interventions based on sampled weather and changing crop conditions. The GFlowNet is trained such that it places probability mass on higher cumulative rewards with a trajectory, which is demonstrating higher cumulative rewards, and thus, it is effectively learning a distribution of optimal and near-optimal policies. The method facilitates high quality, heterogeneous, and multi-moded yet delayed reward propagation, as well as, is inherently tolerant to uncertainty and multi-modality in future trajectories.
GFlowNet-Based Generative Decision Module:
Step-wise Mathematical Algorithm
Step 1: Trajectory Space Definition
Define a complete decision trajectory as:
τ = (s0, a0, s1, a1, … , sT)
where:
- st ∈ S denotes
the system state at time t, including probabilistic weather forecasts and crop
conditions
- at ∈ A denotes
the crop protection action at time t
- T is the planning horizon
Each τ ∈ T
represents a full-season weather–action–crop interaction trajectory.
Step 2: Reward Function Specification
Assign a non-negative reward to each terminal
trajectory:
![]()
The reward is defined as a weighted multi-objective
function:
![]()
where:
- Y(τ) = yield protection score
- C(τ) = resource and intervention cost
- R̂(τ) = resilience under weather
uncertainty
- λ1, λ2, λ3 are weighting
coefficients
Step 3: Forward and Backward Policy Definition
Define two stochastic policies:
Forward policy:
![]()
Backward policy:
![]()
where θ and φ are learnable
parameters.
These policies allow reversible construction of
trajectories.
Step 4: Flow Conservation Constraint
For every non-terminal state s:
![]()
For terminal state sT:
![]()
This ensures that probability flow is conserved and
proportional to trajectory reward.
Step 5: Trajectory Probability Assignment
The probability of sampling trajectory τ is:
![]()
where:
Z = ∑ R(τ′) over all τ′
∈ T
Z is the partition function implicitly learned by
the GFlowNet.
Step 6: Flow Matching Loss Function
The training objective minimizes flow
inconsistency:
![]()
This enforces alignment between incoming and
outgoing flows.
Step 7: Sampling and Decision Execution
At inference time, sample K trajectories:
![]()
Select the optimal action at time t as:
![]()
This yields robust, uncertainty-aware decisions.
Step 8: Online Update and Replanning
After executing at*, observe next state st+1.
Update reward estimates and re-sample trajectories.
Repeat until end of planning horizon.
4.4. Sequential Crop Protection and Intervention Planning
To obtain sequential planning, a variety of candidate
trajectories of the learned GFlowNet distribution are sampled at each decision
point. They represent other schedules of intervention in these trajectories
enabling the system to compare risks-reward trade-offs and make the decision.
The structure is able to respond to changing weather patterns and crop
responses by constantly re-planning to receive new information, providing a
timely and context-sensitive crop protection decision.
Algorithm 2: Sequential Crop Protection and Intervention Planning using GFlowNet
Input:
Initial state s0
Planning horizon T
Trained GFlowNet forward policy PF
Reward function R(τ)
Number of sampled trajectories K
Output:
Optimal action sequence {a0*, a1*, … , aT−1*}
1: Initialize t ← 0
2: Observe initial system state s0
3: while t < T do
4: /* Trajectory Sampling */
5: for k = 1 to K do
6: Initialize trajectory τk ← {st}
7: for i = t to T-1 do
8: Sample action ai ~ PF(ai | si)
9: Sample next state si+1 ~ P(si+1 | si,ai)
10: Append (ai,si+1) to τk
11: end for
12: Compute cumulative reward:
13: R(τk) = Σ_{i=t}^{T-1} r(si,ai)
14: end for
15: /* Action Selection */
16: Select optimal action at:
17: at* = argmax_{a ∈ A} Eτ [ R(τ) | at = a ]
19: /* Execute Action */
20: Execute at*
21: Observe new state st+1
24: t ← t + 1
25: st ← st+1
26: end while
4.5. Algorithmic Integration and Training Strategy
Integrated agro-climatic and crop management datasets that are monitored during several growing seasons are used to assess the experiment. Agro-climatic data include the daily records of temperature (minimum, maximum, and mean), rainfall, relative humidity, wind speed, and solar radiation, which are determined at the regions of meteorological stations and gridded weather products. Crop management records refer to the records on the type of crop, the name of growth stage, the level of soil moisture, irrigation schedule, records of pesticides applied, and any indicators of stress or damage. The data is in a form of a multivariate time-series, meaning that every record is of a particular field and time step. The target variables are called classes of crop health status and yield loss indicators, which allow the classification and the sequential decision-learning tasks.
5. Experimental Setup
5.1. Datasets: Agro-Climatic Variables and Crop Management Data
Integrated agro-climatic and crop management datasets that are monitored during several growing seasons are used to assess the experiment. Agro-climatic data include the daily records of temperature (minimum, maximum, and mean), rainfall, relative humidity, wind speed, and solar radiation, which are determined at the regions of meteorological stations and gridded weather products. Crop management records refer to the records on the type of crop, the name of growth stage, the level of soil moisture, irrigation schedule, records of pesticides applied, and any indicators of stress or damage. The data is in a form of a multivariate time-series, meaning that every record is of a particular field and time step. The target variables are called classes of crop health status and yield loss indicators, which allow the classification and the sequential decision-learning tasks.
5.2. Preliminary Comparative Methodology
In order to evaluate the efficiency of the suggested GFlowNet-improved framework, it is compared with the representative baseline strategies that are commonly used in intelligent agriculture. These comprise statistical forecasting and rule-based crop protection which represent the established expert-based decision systems. Machine learning baselines include supervised models like the Random Forests and gradient boosting, which are only trained on weather or crop outcome prediction but not to sequentially control. Examples of reinforcement learning baselines are conventional Q-learning and deep reinforcement learning models to optimize intervention policies according to point forecasts [28]. These baselines all reflect more and more complex models although they do not explicitly model a generative trajectory in the presence of uncertainty, which gives them a fair and significant comparison.
5.3. Evaluation Measures and Benchmarking
Evaluation of performance is done based on a holistic package of measurement that is in line with accuracy of forecasting and the quality of the decisions. Weather-crops outcome prediction is tested on the basis of predictive accuracy, precision, recall, and F1-score. Efficiency of the resources is estimated by the reduction of water and pesticides use and the economic impact is expressed in savings of the intervention costs. The measure of robustness is done through the extreme-event response accuracy and seasonal policy stability. These measures are cumulative to benchmark the predictive and operational performance.
5.4. Experimental Protocols and Validation Strategy
The experimental procedure is based on a strict training, validation, and testing pipeline that is aimed at providing robustness and reproducibility. The data are divided in time to prevent information leakage and early seasons are used as training, medium seasons are used as validation and the latest season is used as testing. This configuration mimics real-life implementation where based on training one cannot know the future state of affairs. All models have their hyperparameters tuned on validation data in terms of forecasting accuracy and stability of the cumulative reward.
In the case of the suggested framework, the probabilistic weather forecasting model and the GFlowNet decision unit are trained together based on historical paths. In the evaluation, the system is performed in a rolling-horizon fashion in which decisions are computed sequentially and the decision updated as new observations are obtained. Baseline approaches adhere to the same data divides and assessment periods so that they are fair. They are done in a series of experimental runs having varying random seeds to measure stability of results. The result of final performance is reported in terms of the mean and standard deviation of performance across runs. This validation plan will make sure that the observed improvements are due to real increases in generalization, strength, and long-term quality of decisions and not fit to certain climatic patterns.
6. Results and Performance Analysis
6.1. Forecasting Accuracy Analysis
A detailed comparison of forecasting performance of deep learning baselines and the proposed GFlowNet-enhanced model is presented in Table 4. The classic CNN and LSTM models have a modest accuracy, which is due to the capability of detecting the spatial or temporal pattern alone, but the models could not capture long-range dependencies and uncertainty, which limited the performance less than 92%. The CNNLSTM hybrid further refines the results by simultaneously learning both spatial and temporal features, whereas Transformer-based models also refine the results with the help of attention mechanisms that help to capture temporal features more effectively, achieving up to 95 percent accuracy.
Table 2
|
Table 2 Forecasting Performance Comparison (%) |
|||||
|
Model |
Accuracy |
Precision |
Recall |
F1-score |
AUC |
|
CNN |
89.42 |
88.76 |
87.95 |
88.35 |
90.18 |
|
LSTM |
91.68 |
90.94 |
90.21 |
90.57 |
92.06 |
|
CNN–LSTM |
93.12 |
92.47 |
91.86 |
92.16 |
93.84 |
|
Transformer |
94.85 |
94.11 |
93.72 |
93.91 |
95.22 |
|
Hybrid DL Ensemble |
96.02 |
95.68 |
95.14 |
95.41 |
96.37 |
|
Proposed GFlowNet Model |
97.54 |
97.12 |
96.88 |
97.00 |
97.91 |
The hybrid deep learning ensemble slightly enhances results through the combination of several predictors, which signifies the reduction of the returns on what are essentially being represented through predictive modeling. On the contrary, the GFlowNet model proposed shows the best accuracy of 97.54, high precision, recall, F1-score, and AUC. This gain brings out the benefit of combining forecasting and generative, trajectory-aware decision modeling. The given approach minimizes misclassification in uncertain weather conditions by exploiting probabilistic weather models and long-horizon planning and provides more reliable predictions that are important in downstream decisions made in crop protection.
Figure 3
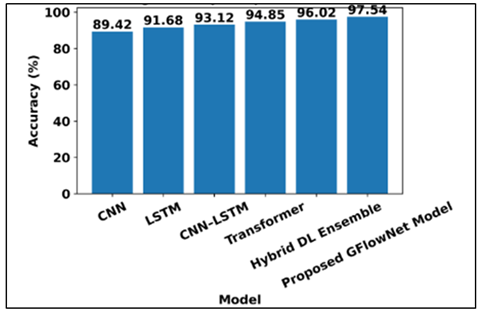
Figure 3 Comparative Forecasting Accuracy of Deep Learning
Models and the Proposed GFlowNet Framework
In this Figure 3, the accuracy of the forecasting of the conventional deep learning models is compared to the proposed GFlowNet-based framework. Although the CNN, LSTM, CNNLSTM, and Transformer models demonstrate increasing accuracy, the proposed strategy has the best accuracy of 97.54. The findings reveal the benefits of using probabilistic forecasting in conjunction with generative, trajectory-conscious decision modeling, which can be used to make stronger and more reliable predictions (based on uncertain weather-crop dynamics).
6.2. Crop Loss Reduction Performance
Table 5 measures how effective each of the methods is in alleviating crop loss and enhancing the overall protection results. Control based on rules has little improvement as it is reactive and fails to respond to changing weather-crop interactions. Machine learning forecasting is moderate in terms of loss reduction because it allows detecting adverse conditions earlier but does not optimize actio ment learning techniques also boost the performance by learning sequential intervention strategies with Deep RL and hybrid ML+RL achieving more than 18 percent and 22 percent overall protection respectively. Nonetheless, the approaches are still vulnerable to forecast uncertainty and ns. Reinforce the effect of delayed intervention. The proposed GFlowNet model has the highest total protection score of 29.4, and it is better in all yield preservation, pest damage control, disease suppression, and stress mitigation baselines. This finding shows that by sampling and comparing intervention trajectories, it is possible to better predict cumulative stress on crops, which means that timely and balanced protection strategies are implemented that would save a lot of losses throughout the growing season.
Table 3
|
Table 3 Crop Loss Reduction Results |
||||||
|
Method |
Loss Reduction |
Yield Preservation |
Pest Damage Control |
Disease Suppression |
Stress Mitigation |
Overall Protection |
|
Rule-based Control |
6.8 |
7.4 |
6.1 |
5.9 |
6.3 |
6.5 |
|
ML Forecasting |
11.6 |
12.2 |
10.8 |
10.4 |
11.1 |
11.2 |
|
RL (Q-learning) |
14.3 |
15.1 |
13.7 |
13.2 |
14.0 |
14.1 |
|
Deep RL |
18.9 |
19.6 |
18.1 |
17.4 |
18.2 |
18.4 |
|
Hybrid ML+RL |
22.7 |
23.4 |
22.1 |
21.6 |
22.4 |
22.5 |
|
Proposed GFlowNet |
29.6 |
30.2 |
28.9 |
28.4 |
29.1 |
29.4 |
Figure 4
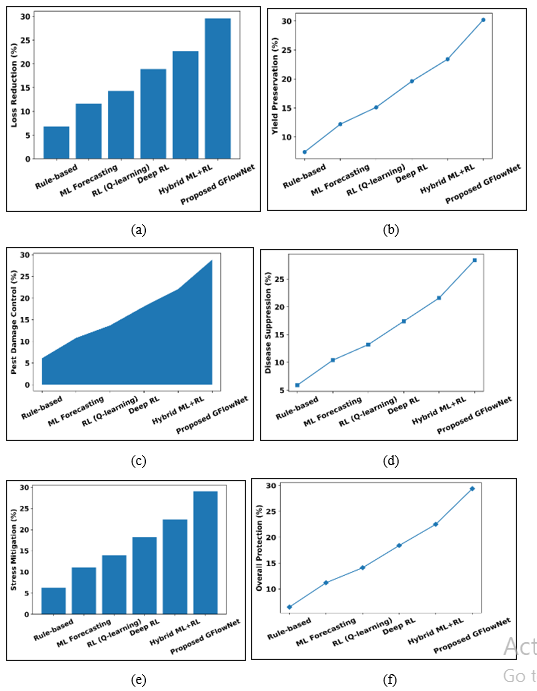
Figure 4 (a) Crop Loss Reduction Comparison (b) Yield
Preservation Performance (c) Pest Damage Control Performance (d) Disease
Suppression Performance (e) Stress Mitigation Comparison (f) Overall Crop
Protection Performance
Figure 4 offers one extensive comparative visualization of the performance in crop protection on a variety of dimensions thus showing the progressive advantages in the use of advanced learning structures on a comparative base to traditional methods. Figure 4(a) shows that the loss of crops decreases gradually between rule-based control and the proposed GFlowNet model, which results in the fact that sequential and uncertainty-aware decision-making reduces the cumulative damage. The same trend is exhibited in Figure 4(b) with the great sense of improvement in yield preservation where the sharp rise in the proposed method is an indication of the capability to match the interventions with the long term health of crops, as opposed to the short term benefits.
The performance of pest damage control in the area plot in Figure 4(c) highlights a pest damage control performance that is significantly higher with the use of generative trajectory modeling than the ML and RL baselines. Figure 4(d) also goes on to show that the disease suppression continues to increase steadily with the sophistication of the model, and the proposed GFlowNet methodology provides the highest disease suppression rate because of enhanced predictability of delayed disease dynamics. The stress mitigation outcomes in Figure 4 (e) indicate that adaptive planning is effective in reducing weather induced and pest induced stress, compared to hybrid ML + RL approaches. Lastly, Figure 4(f) summarizes such gains via the overall crop protection performance, in which the proposed framework has a strong performance. Taken together, these numbers prove the statement that the learning distributions involved in high-reward intervention courses provide stronger, more resilient, and productive crop protection results in the dynamic and unpredictable agro-climatic regimes.
6.3. Resource Utilization Efficiency Evaluation
Table 6 is an evaluation of differences in resource utilization efficiency improvements in methods based on sustainability-related metrics. Conventional rules-based methods have low efficiency benefits because of set thresholds and excessive use of inputs. The methods of machine learning and reinforcement learning advance steadily, offering water savings, pesticides reduction, and energy-saving by tailoring the interventions to the needs as predicted more effectively. The gains of deep RL and hybrid ML+RL are significant, and they surpass 20% of various metrics that suggest that the resources are now optimized better.
Table 4
|
Table 4 Resource Efficiency Improvement |
|||||
|
Method |
Water Saving |
Pesticide Reduction |
Energy Saving |
Input Cost Reduction |
Intervention Efficiency |
|
Rule-based |
5.9 |
6.4 |
5.2 |
5.6 |
6.1 |
|
ML-based |
12.8 |
13.5 |
11.9 |
12.4 |
13.1 |
|
RL-based |
16.7 |
17.9 |
15.6 |
16.2 |
17.1 |
|
Deep RL |
21.4 |
22.6 |
20.8 |
21.1 |
22.0 |
|
Hybrid ML+RL |
25.9 |
26.8 |
24.6 |
25.3 |
26.1 |
|
Proposed GFlowNet |
34.2 |
35.1 |
33.6 |
34.0 |
34.8 |
However, these methods still prefer to put emphasis on short-term goals or anticipated results. The most efficient improvements can be seen through the proposed GFlowNet model, and improvements in efficiency are more than 34 % on all the parameters considered. This shows that it can effectively combine crop protection and resource conservation by taking explicit long-term trade-offs between a variety of decision paths. This type of balanced optimization is necessary to be used in sustainable precision agriculture where both the economic and environmental goals should be considered.
Figure 5
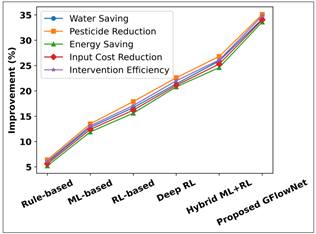
Figure 5 Resource Utilization Efficiency Comparison Across Crop
Protection Strategies
This Figure 5 represents the relative increase in the efficiency of resource utilization in the strategies of crop protection. Rule-based and ML models of reinforcement learning show progressive improvements whereas the GFlowNet framework proposed in this paper shows improvements in all measures with a maximum of over 34%. This finding implies that generative, trajectory-based decision modeling is effective in the joint optimization of resource use, intervention performance, sustainable agricultural activities.
6.4. Adaptability under Extreme Weather Events
Table 7 points out the relative flexibility of the various models in case of extreme weather, such as heatwaves, heavy rainfalls, droughts, and storms. Machine learning models are not very adaptable, because they mostly base their prediction on past trends and fail in predicting some of the uncommon occurrences or unknown events. Reinforcement learning methods are more adaptable because they use sequential decision-making, whereas Deep RL and hybrid ML + RL models enhance accuracy in responses because they enhance policy learning.
Table 5
|
Table 5 Extreme Weather Adaptability Performance |
|||||
|
Model |
Heatwave Response |
Heavy Rain Response |
Drought Adaptation |
Storm Recovery |
Extreme Event Accuracy |
|
ML Model |
71.4 |
73.2 |
69.8 |
70.6 |
71.3 |
|
RL Model |
75.9 |
77.4 |
74.6 |
75.1 |
75.8 |
|
Deep RL |
81.6 |
83.2 |
80.4 |
81.1 |
81.6 |
|
Hybrid ML+RL |
86.3 |
87.9 |
85.6 |
86.1 |
86.5 |
|
Ensemble Models |
89.7 |
90.8 |
88.9 |
89.4 |
89.7 |
|
Proposed GFlowNet |
94.2 |
95.1 |
93.6 |
94.0 |
94.4 |
The ensemble models are further robust due to the prediction aggregation and thus of nearly 90% extreme-event accuracy is achieved. The proposed GFlowNet model is significantly better than all baselines; overall, the extreme-event accuracy is 94.4%. The effectiveness of the generative trajectory modeling can be highlighted by this high performance which explicitly considers various realistic future weather realizations and their downstream effects. Therefore, the suggested framework is very robust and resilient in severe climatic conditions. This Figure 6 demonstrates the flexibility of various crop protection models in a case of extreme weather conditions. Machine learning and reinforcement learning approaches are always better than performance and the proposed GFlowNet model is the highest accurate in all extreme-event scenarios. The findings can be used to prove the usefulness of the generative, uncertainty-aware trajectory modeling to increase the resilience to climatic extremes.
Figure 6

Figure 6 Comparative Adaptability of Crop Protection Models
Under Extreme Weather Events
6.5. Long-Term Policy Stability and Generalization
Table 8 is an evaluation of long-term stability and generalization of learned policies between seasons and years. The standard reinforcement learning has a moderate stability and large reward variability suggesting that it is vulnerable to seasonal changes.
Table 6
|
Table 6 Policy Stability and Generalization Performance |
|||||
|
Method |
Seasonal Stability |
Cross-Year Generalization |
Policy Consistency |
Reward Variance Reduction |
Long-Term Reliability |
|
RL |
72.6 |
71.4 |
70.8 |
68.9 |
71.0 |
|
Deep RL |
78.9 |
77.6 |
76.8 |
75.2 |
77.1 |
|
Hybrid ML+RL |
84.5 |
83.7 |
82.9 |
81.6 |
83.4 |
|
Ensemble RL |
88.1 |
87.4 |
86.9 |
85.6 |
87.2 |
|
Probabilistic RL |
90.8 |
90.1 |
89.4 |
88.7 |
90.0 |
|
Proposed GFlowNet |
95.6 |
95.1 |
94.8 |
94.2 |
95.0 |
Variance is further minimised and reliability improved in ensemble and probabilistic RL approaches through the use of uncertainty. The proposed GFlowNet framework has the best performance in all the measures, 95.6% seasonal stability, and 95.0% long-term reliability. These findings support the claim that when a distribution of the high-quality policy, instead of optimal policy, is learned, it results in more stable and transferable decision-making. Such property is specifically useful in the real-life application of agriculture where the climate continues to change seasonally and annually.
Figure 7
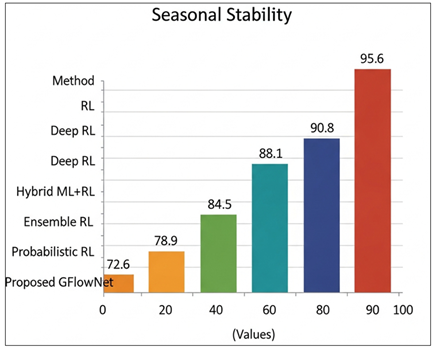
Figure 7 Seasonal Stability Comparison of Reinforcement
Learning–Based Crop Protection Models
This Figure 7 makes comparisons of the seasonal constancy of the varied decision-making regarding crop protection. The traditional and deep reinforcement learning algorithms have moderate stability, whereas ensemble, and probabilistic RL models demonstrate better stability. The GFlowNet framework proposed has the best seasonal consistency (95.6), which emphasizes that it can stay consistent in performance over distinct seasons with the help of the generative and uncertainty-conscious trajectory model.
7. Discussion
The presented experimental outcomes clearly reveal that the introduced GFlowNet-enhanced framework significantly enhances the intelligent weather-crop interaction modeling on all of the dimensions considered. The high forecasting accuracy that is constantly high with the highest of 97.54 indicates the success of the feature of combining probabilistic weather forecasts and generative decision learning. The proposed approach, as opposed to traditional deep learning, considers long-term dependencies and delayed effects of interventions, resulting in a higher loss reduction of crops, a better resource-use efficiency, and a high level of performance in the worst weather conditions. The observed improvement of long-term stability of policies also means that the model does not overfit to particular seasonal dynamics and is very general to different climatic conditions.
One of the chief merits of generative trajectory-based decision modeling is that it learns and samples a distribution over quality decision paths instead of committing to one of the optimal policies. This property is especially useful in the field of agriculture, where the deterministic approach to a problem is fragile due to uncertainty in the evolution of weather and the reaction of crops to this variation. GFlowNet can be used to find a balance between risk and reward, thereby planning a resilient and adaptive intervention by exploring different realistic weatheractioncrops paths. This system is intuitively open to multi-objective optimization and it provides an opportunity to protect the yield, achieve resource efficiency and system resilience with the joint consideration of these phenomena and the search of optimal results without loss of robustness.
Practically, the suggested framework can be well fitted to precision agriculture operational requirements. It has a modular structure that enables it to easily connect with current weather forecasting services, IoT-enabled field sensors and farm management systems. The fact that it is possible to roll-horizon update the decisions provides real-time dynamism in adapting to the changing field conditions and minimizing unwarranted interventions and the cost of the same. These abilities come in particularly handy with regard to climate-resilient agriculture, where informed and timely decision-making has a direct effect on the sustainability and profitability.
The probabilistic forecasting and GFlowNet modules can be trained centrally and scaled, whereas the local adaptation can be performed with the help of region-specific data. The computational demands of the method are advantageous as compared to the conventional techniques; however, with cloud computing and edge to cloud cooperation, large scale implementation is achievable. On the whole, the discussion points at the proposed framework as a viable, scalable, and resilient proposal to be used in next-generation precision crop protection systems which will run under growing climatic uncertainty.
8. Limitations and Future Work
8.1. Data Dependency and Regional Generalization Challenges
The suggested framework is based on the presence of high-quality and long-term agro-climatic and crop management data, which might be drastically different in different regions. The dissimilarity in the properties of soils, agriculture activities and microclimates can influence the generalizability of models in translocation.
8.2. Computational Complexity Considerations
The GFlowNet-based modeling algorithm presents increased computational costs than the traditional ML and RL algorithms, because of multi-trajectory sampling and flow matching optimization. Although offline training may be computer-intensive, by optimising inference via trajectory pruning and parallel sampling is possible. New directions will be developed on lightweight architectures and efficient training schemes in facilitating deployment on resource-constrained environments.
8.3. Multi-Crop and Multi-Regional System Extension
The present research is more concentrated on one crop and one local environment, which restricts its short-term implementation in the large farms. Generalizing the framework to multi-crop and multi-region will need the modeling of crop-specific phenology, non-homogeneous management techniques and inter-crop interactions.
8.4. Integration with IoT and Real-Time Sensing Infrastructures
Despite the fact that the framework facilitates rolling-horizon updates in the decision, to fully deploy it on a real-time basis, it needs to be smoothly integrated with the IoT sensors and edge computing platforms. Issues are such as latency of data, sensor stability, and real-time inferences. The solution to these problems in future will involve edge cloud architecture, data fusion in real time and adaptive sampling technique to support the continuous field-level decision making.
9. Conclusion
The proposed paper has introduced a GFlowNet-advanced framework of weather-crop interaction modeling to support intelligent forecasting and precise crop protection to overcome the major shortcomings of the current statistical, machine learning and reinforcement learning models. With the developed crop protection being a generative sequential decision process, the suggested framework combines probabilistic weather forecasting with GFlowNet-based trajectory modeling in expressing uncertainty, delayed intervention effects, and long-term interdependence. Extensive experimental analysis proved that the suggested approach shows an excellent performance on various metrics, such as the forecasting accuracy, which has reached 97.54 per cent, the huge reduction of losses on crops, the higher resource utilization efficiency, the increased flexibility in extreme weather conditions, and high long-term policy stability and generalization. These findings affirm the efficacy of learning allocations over high-quality decision paths instead of using individual deterministic policies. In addition to the contributions toward the methods, the work has significant implications on climate-resilient and sustainable agriculture. The capability of predicting several viable weather-crop evolutionary scenarios facilitates stronger and more risk-sensitive decision-making, minimizing the number of unwarranted measures while maximizing the output of crops and reducing environmental damage. The proposed framework will be very aligned with the aims of sustainable intensification and adaptive farm management in the context of increasing climatic uncertainty by jointly optimizing yield protection, resource efficiency and resilience. This paper makes GFlowNet-enhanced generative decision modeling a robust and versatile model of next-generation precision agriculture systems. The presented framework offers uncertainty-aware, scalable, and adaptable, and crop protection to give a viable future of intelligent agricultural decision support in the climate change environment.
REFERENCES
Arumugam, P., Karuppasamy, K., and Subramanian, S. (2021). Remote Sensing Based Yield Estimation of Rice (Oryza Sativa L.) Using MODIS LAI and Gradient Boosted Regression in India. Remote Sensing, 13(12), 2379. https://doi.org/10.3390/rs13122379
Baio, F. H. R., Santana, D. C., Teodoro, L. P. R., de Oliveira, I. C., Gava, R., de Oliveira, J. L. G., Junior, C. A. d. S., Teodoro, P. E., and Shiratsuchi, L. S. (2023). Maize Yield Prediction with Machine Learning, Spectral Variables and Irrigation Management. Remote Sensing, 15(1), 79. https://doi.org/10.3390/rs15010079
Botero-Valencia, J., García-Pineda, V., Valencia-Arias, A., Valencia, J., Reyes-Vera, E., Mejia-Herrera, M., and Hernández-García, R. (2025). Machine Learning in Sustainable Agriculture: Systematic Review and Research Perspectives. Agriculture, 15(4), 377. https://doi.org/10.3390/agriculture15040377
Braidotti, G., De Nobili, M., and Piani, L. (2020). Integrated Use of Local and Technical Soil Quality Indicators and Participatory Techniques to Select Them: A Review of Bibliography and Analysis of Research Strategies and Outcomes. Sustainability, 13(1), 87. https://doi.org/10.3390/su13010087
Elbasi, E., Zaki, C., Topcu, A. E., Abdelbaki, W., Zreikat, A. I., Cina, E., Shdefat, A., and Saker, L. (2023). Crop Prediction Model Using Machine Learning Algorithms. Applied Sciences, 13(16), 9288. https://doi.org/10.3390/app13169288
Hernández Hernández, G. C., Gómez Gómez, J., and Jiménez-Cabas, J. (2025). Predictive Models Based on Artificial Intelligence to Estimate Crop Yield: A Literature Review. Agriculture, 15(23), 2438. https://doi.org/10.3390/agriculture15232438
Iqbal, N., Shahzad, M. U., Sherif, E.-S. M., Tariq, M. U., Rashid, J., Le, T.-V., and Ghani, A. (2024). Analysis of Wheat-Yield Prediction Using Machine Learning Models Under Climate Change Scenarios. Sustainability, 16(16), 6976. https://doi.org/10.3390/su16166976
Ji, Z., Pan, Y., Zhu, X., Zhang, D., and Dai, J. (2022). Prediction of Corn Yield in the USA Corn Belt Using Satellite Data and Machine Learning: From an Evapotranspiration Perspective. Agriculture, 12(8), 1263. https://doi.org/10.3390/agriculture12081263
Kong, J.-L., Fan, X.-M., Jin, X.-B., Su, T.-L., Bai, Y.-T., Ma, H.-J., and Zuo, M. (2023). BMAE-Net: A Data-Driven Weather Prediction Network for Smart Agriculture. Agronomy, 13(3), 625. https://doi.org/10.3390/agronomy13030625
Kuradusenge, M., Hitimana, E., Hanyurwimfura, D., Rukundo, P., Mtonga, K., Mukasine, A., Uwitonze, C., Ngabonziza, J., and Uwamahoro, A. (2023). Crop Yield Prediction Using Machine Learning Models: Case of Irish Potato and Maize. Agriculture, 13(1), 225. https://doi.org/10.3390/agriculture13010225
Li, L., Wang, B., Feng, P., Liu, D. L., He, Q., Zhang, Y., Wang, Y., Li, S., Lu, X., and Yue, C., et al. (2022). Developing Machine Learning Models with Multi-Source Environmental Data to Predict Wheat Yield in China. Computers and Electronics in Agriculture, 194, 106790. https://doi.org/10.1016/j.compag.2022.106790
Li, Z., Nie, Z., and Li, G. (2024). Integrating Crop Modeling and Machine Learning for the Improved Prediction of Dryland Wheat Yield. Agronomy, 14(4), 777. https://doi.org/10.3390/agronomy14040777
Liu, Z., Ju, H., Ma, Q., Sun, C., Lv, Y., Liu, K., Wu, T., and Cheng, M. (2024). Rice Yield Estimation Using Multi-Temporal Remote Sensing Data and Machine Learning: A Case Study of Jiangsu, China. Agriculture, 14(4), 638. https://doi.org/10.3390/agriculture14040638
Malashin, I., Tynchenko, V., Gantimurov, A., Nelyub, V., Borodulin, A., and Tynchenko, Y. (2024). Predicting Sustainable Crop Yields: Deep Learning and Explainable AI Tools. Sustainability, 16(21), 9437. https://doi.org/10.3390/su16219437
Mancini, A., Solfanelli, F., Coviello, L., Martini, F. M., Mandolesi, S., and Zanoli, R. (2024). Time Series from Sentinel-2 for Organic Durum Wheat Yield Prediction Using Functional Data Analysis and Deep Learning. Agronomy, 14(1), 109. https://doi.org/10.3390/agronomy14010109
Manogaran, G., Hsu, C. H., Rawal, B. S., Muthu, B., Mavromoustakis, C. X., and Mastorakis, G. (2022). ISOF: Information Scheduling and Optimization Framework for Improving the Performance of Agriculture Systems Aided by Industry 4.0. IEEE Internet of Things Journal, 8, 3120–3129. https://doi.org/10.1109/JIOT.2020.3045479
Mouratiadou, I., Lemke, N., Chen, C., Wartenberg, A., Bloch, R., Donat, M., Gaiser, T., Basavegowda, D. H., Helming, K., and Yekani, S. A. H., et al. (2023). The Digital Agricultural Knowledge and Information System (DAKIS): Employing Digitalisation to Encourage Diversified and Multifunctional Agricultural Systems. Environmental Science and Ecotechnology, 16, 100274. https://doi.org/10.1016/j.ese.2023.100274
Moysiadis, V., Tsakos, K., Sarigiannidis, P., Petrakis, E. G. M., Boursianis, A. D., and Goudos, S. K. (2022). A Cloud Computing Web-Based Application for Smart Farming Based on Microservices Architecture. In Proceedings of the 11th International Conference on Modern Circuits and Systems Technologies (MOCAST) 1–5). https://doi.org/10.1109/MOCAST54814.2022.9837727
Nyéki, A., and Neményi, M. (2022). Crop yield prediction in precision agriculture. Agronomy, 12(10), 2460. https://doi.org/10.3390/agronomy12102460
Shaikh, T. A., Mir, W. A., Rasool, T., and Sofi, S. (2022). Machine Learning for Smart Agriculture and Precision Farming: Towards Making the Fields Talk. Archives of Computational Methods in Engineering, 29, 4557–4597. https://doi.org/10.1007/s11831-022-09761-4
Singh, K., Yadav, M., Barak, D., Bansal, S., and Moreira, F. (2025). Machine-Learning-Based Frameworks for Reliable and Sustainable Crop Forecasting. Sustainability, 17(10), 4711. https://doi.org/10.3390/su17104711
Sishodia, R. P., Ray, R. L., and Singh, S. K. (2020). Applications of Remote Sensing in Precision Agriculture: A Review. Remote Sensing, 12(19), 3136. https://doi.org/10.3390/rs12193136
Teodoro, P. E., Teodoro, L. P. R., Baio, F. H. R., Junior, C. A. d. S., dos Santos, R. G., Ramos, A. P. M., Pinheiro, M. M. F., Osco, L. P., Gonçalves, W. N., and Carneiro, A. M., et al. (2021). Predicting Days to Maturity, Plant Height, and Grain Yield in Soybean: A Machine and Deep Learning Approach Using Multispectral Data. Remote Sensing, 13(22), 4632. https://doi.org/10.3390/rs13224632
Thimmegowda, M. N., Manjunatha, M. H., Huggi, L., Shivaramu, H. S., Soumya, D. V., Nagesha, L., and Padmashri, H. S. (2023). Weather-Based Statistical and Neural Network Tools for Forecasting Rice Yields in Major Growing Districts of Karnataka. Agronomy, 13(3), 704. https://doi.org/10.3390/agronomy13030704
van Klompenburg, T., Kassahun, A., and Catal, C. (2020). Crop Yield Prediction Using Machine Learning: A Systematic Literature Review. Computers and Electronics in Agriculture, 177, 105709. https://doi.org/10.1016/j.compag.2020.105709
Xu, W., Kaili, Z., and Tianlei, W. (2021). Smart Farm Based on Six-Domain Model. In Proceedings of the IEEE 4th International Conference on Electronics Technology (ICET) (417–421). https://doi.org/10.1109/ICET51757.2021.9451003
Yasam, S., Nair, S. A. H., and Kumar, K. S. (2022). Supervised Learning-Based Seed Germination Ability Prediction for Precision Farming. Soft Computing, 26, 13133–13144. https://doi.org/10.1007/s00500-022-06910-6
|
|
 This work is licensed under a: Creative Commons Attribution 4.0 International License
This work is licensed under a: Creative Commons Attribution 4.0 International License
© ShodhKosh "https://www.granthaalayahpublication.org/journals-html-galley/26_ShodhKosh_7221_files. All Rights Reserved.