ShodhKosh: Journal of Visual and Performing ArtsISSN (Online): 2582-7472
|
|
Autonomous Kinetic Sculptures in Visual Culture: A Cross-Disciplinary Approach to Art and Engineering
Dr. Ashish Suresh
Patel 1![]()
![]() ,
Dr. Nandini V Dhole 2
,
Dr. Nandini V Dhole 2![]() , Shirish Jaysing Navale 3
, Shirish Jaysing Navale 3![]()
![]() , Dr. Girish Jaysing Navale
4
, Dr. Girish Jaysing Navale
4![]()
![]()
1 Parul Institute of Technology, Parul
University, India
2 Assistant Professor,
Department E & TC Engineering, RMD Sinhgad School of Engineering Warje,
Pune, India
3 Aissms College of Engineering, Pune, India
4 Aissms Institute of Information Technology, Pune, India
|
|
|
ABSTRACT |
|
|
This paper
discusses a cross-disciplinary paradigm, combining aesthetics theory, motion
mechanism, embedded computing and adaptive control, to create
self-controlling sculptures that can dynamically interact with their
surroundings. Based on historical development of kinetic art, which began
with mechanical experimentation in the early 20 th century to cybernetic and
interactive installations, the study places the autonomous artworks of the
contemporary era in both artistic and technological traditions. The paper
discusses fundamental engineering ideas underlying such systems, such as the
kinematic modeling, actuator selection, microcontroller-based architectures,
sensor integration and feedback control systems. Special attention is paid to
more and less autonomy, beginning with the behavioral programming under rules
and ending with machine learning-based adaptive behavior. Mixed-method
approach is a methodology that integrates both artistic prototyping and
engineering simulation and performance evaluation by allowing the further
refinement of expressive and functional aspects during the process. Through
experimental implementations, it can be shown that the combination of
real-time environmental sensing and adaptive algorithms can be used to
increase the level of audience engagement and resilience of the system. |
|||
|
Received 23 September 2025 Accepted 26 December
2025 Published 17 February 2026 Corresponding Author Shirish
Jaysing Navale, anjaymishra2000@gmail.com DOI 10.29121/shodhkosh.v7.i1s.2026.7192 Funding: This research
received no specific grant from any funding agency in the public, commercial,
or not-for-profit sectors. Copyright: © 2026 The
Author(s). This work is licensed under a Creative Commons
Attribution 4.0 International License. With the
license CC-BY, authors retain the copyright, allowing anyone to download,
reuse, re-print, modify, distribute, and/or copy their contribution. The work
must be properly attributed to its author.
|
|||
|
Keywords: Kinetic Sculpture, Autonomous Systems, Embedded
Control, Interactive Art, Cybernetic Design, Mechatronic Aesthetics |
|||


1. INTRODUCTION
The autonomous kinetic sculptures mark an enormous transformation in the visual culture that includes the element of artistic expression and advanced engineering frameworks to create dynamic, responsive, and self-regulating work of art. Compared to the traditional unchanging sculpture, kinetic ones also involve movement as the primary aesthetic element and transform the space, perception, and interaction. There is the addition of autonomy, and this is through embedded computation, which causes the sculpture to be an intelligent artifact that can respond to the stimulus in the environment and the interaction of the human being without the need to be controlled by human beings always. This convergence theorizes the greater technological shifts in contemporary society in which artificial intelligence, robotics and cyber-physical systems are shaped by technology with more frequency on cultural productions and experienced design Gorb et al. (2025). The historical roots of kinetic sculpture lie in the experiment of the avant-garde of the first part of the twentieth century. Naum Gabo and Laszlo Moholy-Nagy were artists, who explored the marvels of movement, light and mechanical constructions as part of art. The first sculptural practice followed the invention of suspended mobiles by Alexander Calder later on where the organic movement occurred due to air currents and balance. These extreme magazines sabotaged the idea of permanence and of materiality in stasis and placed movement as a language of form to the fore. This paradigm was further extended by subsequent twentieth century cyberscientific art developments that also involved feedback loops and interactive systems into the production of art Su (2019). However, today, with the emergence of microcontrollers, sensors, and machine learning algorithms, sculptures can move and even feel, make a decision, and develop. Autonomous kinetic sculptures fit in the strange interdisciplinary fringe in the world of the modern visual culture. The built in system illustrated in Figure 1 allows intelligent motion and adaptive expression. They synthesize the principles of mechanical design such as a kinematic analysis, dynamics analysis and structural analysis with embedded systems engineering and computation intelligence Song et al. (2022). The expressive physical movement of programmed logic is done through the action of actuators, servo motors, the stepper motors, and pneumatic mechanisms.
Figure 1
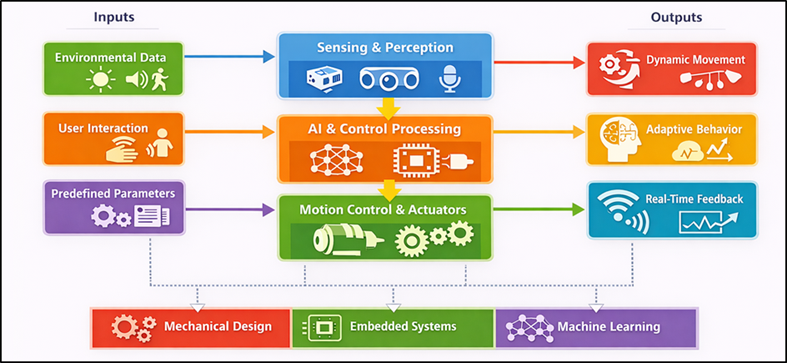
Figure 1 Autonomous Kinetic Sculpture System Integrating Art,
Engineering, and AI-Based Control
These devices are controlled by microcontroller systems and receive input data on the proximity sensors, the light sensors, the environmental sensors or computer vision systems. This allows stabilization of the sculpture and at the same time response to the outside stimulus fluidly to feedback control strategies, including proportional-integral-derivative (PID) control, or adaptive algorithms. This causes the artwork to become a system that is cyber-physical where an aesthetic behavior can be established through engineered interactions Ilieva et al. (2022). Due to the application of artificial intelligence, kinetic art possesses a broader conceptual framework. The machine learning models allow the sculptures to learn the behavioral patterns of the audience, environmental changes or time changes and adjust moving patterns in real-time Wei and Shen (2023). The medium of the sculpture is not merely a human act of expression; the sculpture plays a kind of quasi-creative position and brings about unforeseen outcomes of manipulated parameters. This shift is a bigger philosophical debate of intelligent machines and creative systems within the current culture.
2. Historical and Theoretical Foundations of Kinetic Art
2.1. Early pioneers of kinetic sculpture
Kinetic sculpture can be traced back to the early twentieth century experience of experimentation in the avant-garde, during which artists started to break the standstill of traditional sculpture. Naum Gabo was one of the most significant pioneers as he put forward the notion of the so-called kinetic rhythm in the form of the works that embraced real movement as a form of structure and aesthetics Bian (2025). His structures were defined by the use of transparency, space, and movement as composing parts and not decorations. Likewise, Laszlo Moholy-Nagy experimented with light, materials in industries and mechanical rotation in his Light-Space Modulator showing how technological equipment could be used as a sculptural medium. The other revolutionary artist was Alexander Calder whose mobiles brought about the effect of balancing, motioning by the wind Leote (2022). In contrast to machine-made pieces, the sculptures by Calder were based on the power of nature, the priority of chance and organic efficacy. These pioneering artists re-invented sculpture as a time based art form which incorporated physics, engineering and perception. Their works defined the idea of motion as something more than animation but as a language of art, which influenced the further investigations of the art practices mediated through kinetics and technologies Yuan (2022).
2.2. Mechanical Motion in 20th-Century Avant-Garde Movements
The mechanical movement was at the core of some twentieth-century avant-garde movements as a result of industrialization and technological change. The Futurism was a glorification of speed, machinery, and urban energy, an attempt to capture movement as one of the features of contemporary life. Mechanical energy was sculpted by artists like Umberto Boccioni to capture continuity and force in the lifeless materials Li (2022). Mechanical assemblage and motorised elements were later adopted by the Dada and Constructivist artists and were an expression of both fascination and criticism of the industrial systems. Self-destructive mechanical artworks made by the Swiss artist Jean Tinguely satirized automation and commercial culture and made machinery perform as spectacle Patil et al. (2025). During this period, Bauhaus experimentation brought together craft and industrial technology by incorporating engineering concepts in the artistic pedagogy process. These trends put mechanical movement in opposition as a representation of modernity, advancement, and upheaval. Motion was transferred to that of embodiment: sculptures literally played the beats of machines and cityscapes. The era provided the theoretical basis of comprehension of kinetic art as a technical innovation and also as a cultural reaction to the mechanized society Tang and Ge (2025).
2.3. Cybernetic Art and Interactive Systems
The conceptual change between mechanical motion and cybernetic interaction occurred at the mid-twentieth century. Artists were also influenced by the systems theory and principles of feedback, which caused them to start incorporating responsive technologies in their art. Cybernetics according to the explanation given by Norbert Wiener focused on communication and control in machines and living organisms. This theoretical model had a significant influence on the experimentation with art Sun and Chen (2024). Other artists like Nicolas Schöffer came up with cybernetic towers which had sensors and reacted to light, sound and environmental alterations. In the same manner, Gordon Pask has also worked on interactive installations where the behavior of the audience is involved in the output of the system. These pieces proposed feedback, making the spectators members of dynamic systems. Cybernetic art re-conceived the sculptural object as a network of adaptation as opposed to a static object Ye and Sun (2025). Motion was no longer determined but it was controlled by continuous exchange of data between the environment, machine and the viewer. Table 1 provides a comparison between historical evolution and technologies of kinetic sculptures. This paradigm foresaw modern autonomous kinetic sculptures, in which baked-in computation and artificial intelligence support more and more sophisticated and self-contemplative behavior. Combining aesthetics and systems engineering, cybernetic art defined the conceptual framework of interactive and autonomous artistic work Li et al. (2024).
Table 1
|
Table 1 Related Work on Kinetic and Autonomous Sculptural Systems |
|||||
|
Domain |
Core Contribution |
Motion Type |
Technology Used |
Level of Autonomy |
Key Limitation |
|
Constructivism |
Introduced kinetic rhythm in sculpture |
Motorized linear motion |
Early electromechanical systems |
Low (pre-programmed) |
Limited feedback control |
|
Bauhaus [15] |
Light-Space Modulator integrating motion &
light |
Rotational mechanical motion |
Electric motors, light projection |
Low |
No adaptive behavior |
|
Modern Art |
Wind-driven mobile sculptures |
Passive dynamic motion |
Gravity & airflow |
None (natural forces only) |
No computational control |
|
Neo-Dada [16] |
Self-operating mechanical machines |
Motor-driven chaotic motion |
Industrial motors |
Low |
No sensor integration |
|
Cybernetic Art |
Sensor-based responsive towers |
Multi-axis motorized |
Light & sound sensors |
Medium (feedback-based) |
Limited computational power |
|
Interactive Systems |
Audience-driven cybernetic installations |
Reactive motion/light |
Analog feedback circuits |
Medium |
Analog instability issues |
|
Biomimetic Art |
Strandbeest walking mechanisms |
Wind-driven linkage motion |
PVC linkages, mechanical design |
None–Low |
No embedded intelligence |
|
Media Art |
Large-scale interactive installations |
Sensor-triggered motion/light |
Cameras, microcontrollers |
Medium–High |
High energy consumption |
|
Art & Technology |
Interactive robotic sculptures |
Programmable robotic motion |
Embedded systems, AI |
High |
Experimental scalability |
|
Digital Art Research |
AI-integrated kinetic installations |
Algorithmic dynamic motion |
Sensors, ML models |
High |
Maintenance complexity |
|
Computational Art |
AI-driven generative installations |
Data-responsive motion |
Machine learning frameworks |
High |
Data privacy concerns |
3. Engineering Principles Underlying Autonomous Kinetic Sculptures
3.1. Mechanical systems and motion design
Autonomous sculptures have mechanical systems that are the structural and kinetic model of autonomous computing, which transforms the computational instructions into physical movement. Kinematic analysis is the fundamental basis of motion design and it defines the interaction of parts (linkages, gears, cams, shafts, and bearings) to form controlled motions. The designers need to consider the degrees of freedom, torques, load distribution, and structural stability so that it can be aesthetically fluid and structurally reliable. Some commonly used actuation mechanisms are, servo motors, stepper motors, DC motors, pneumatic actuators and linear actuators; each utilizing a type of actuator depending on the precision, speed and force demanded. Dynamic balancing and vibration control is also part of motion design to avoid structural fatigue and unavoidable vibration. Aluminum alloys, lightweight composites, and stainless steel are common materials that are used in order to maximize the strength-to-weight ratios. The tools of computer-aided design (CAD) and multibody simulation allow modeling of the stress distribution and the motion paths before being fabricated. The mechanical design of autonomous systems should design sensors placement, wiring channels and modular access to maintenance needs.
3.2. Embedded Systems and Microcontroller Architectures
Autonomous kinetic sculptures are controlled by embedded systems which have the computational intelligence. A microcontroller forms the central processing unit which engages sensor inputs, decision-making algorithms and actuator outputs in real time. The popular ones are Arduino and Raspberry Pi, since they are versatile, inexpensive, and can be integrated with a wide variety of peripherals. These architectures usually incorporate digital input/output pins and analog-to-digital converters and pulse-width modulation (PWM) channels as well as communication protocols like I2C, SPI and UART.
Figure 2
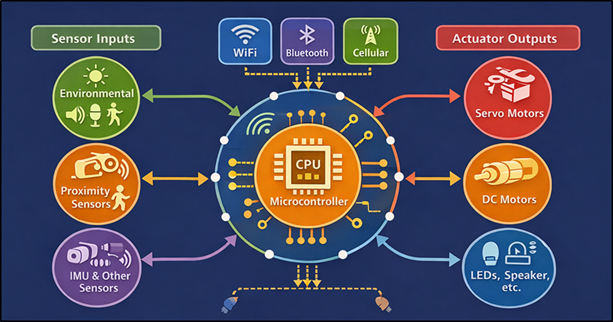
Figure 2 Embedded Microcontroller Architecture for
Sensor–Actuator Integration
In more complex systems, embedded processors can communicate with edge-computing units with the ability to execute machine learning models of inference. The implementation of real-time operating system (RTOS) is possible so that the tasks that run simultaneously are motion control, environmental sensing and communication. Figure 2 indicates microcontroller which coordinates the sensors and actuators functions. Power managing circuits control the level of voltages and guarantee the stable work under changing loads. Strong software structure is essential and it is usually through the use of modular programming, interrupt programs, state-machine programs to organize sophisticated behaviors. Embedded systems make kinetic sculptures responsive and adaptive by incorporating computation into physical structures to enable autonomous acting and expression by kinetic sculptures.
3.3. Sensors and Feedback Control Mechanisms
Adaptive behavior is based on sensors that allow autonomous kinetic sculptures to sensitize and process their environs. There are such common sensing technologies as infrared proximity sensors, ultrasonic distance sensors, light-dependent resistors (LDRs), microphones, temperature sensors, and inertial measurement units (IMU). In the case of interactive installations, computer vision, and depth cameras are capable of measuring the movement of the audience and spatial interactions. These units translate physical stimuli into electrical impulses which are then interpreted by the controller that is incorporated. Feedback control systems facilitate predictable and meaningful movement because of sensor data. The closed-loop control systems are systems in which desired setpoints are compared to the actual system conditions, and actuator commands are adjusted to reduce error. The ProportionalIntegralDerivative (PID) Controllers are usually used to control the speed, position, or orientation at a high precision. In more complex installations, the adaptive or model-predictive control strategies can be applied, so that the sculpture is able to modify its parameters over time. Sensor fusion methods are used to combine several streams of data in order to make the data more reliable and less noisy. The autonomous kinetic sculptures are in a dynamic equilibrium obtained through the mechanisms of continuous feedbacks, balancing spontaneous expressiveness and engineered stability and responsive dynamics to environmental change.
4. Cross-Disciplinary Methodology
4.1. Research design and mixed-method approach
In the design of autonomous kinetic sculptures, the cross-disciplinary research design is employed, and involves both qualitative examination of the artistic research and quantitative examination of engineering. Mixed method approach makes aesthetic discovery and technical confirmation not to develop in a sequence, instead they are developing parallel. The qualitative element is the notion of the conceptual studies, study of the visual culture, survey of the perception of the audience and the sessions of the iterative critique to determine the impact, which is experienced. The approaches are resourceful in identifying the end of art, subject and histories of engagement. System modeling, optimization of motion parameters, energy and consumption analysis, and reliability tests will be considered as the quantitative analysis. The actuator torque output experimental data and response latency measurements and vibration and stability of control-loop are tested statistically. The balance may be achieved by subjectivity and subjective use of empirical validation in the balancing of expressive fluidity and structural rigidity by the researcher. Mixed-method paradigm is more likely to include the cyclic process, which includes conceptualization, prototype building, performance measurement, and audience evaluation and system enhancement. The documentation software consists of motion tracking information, embedded system logs and user interaction analytics. The interaction between the artistic and mechanical engineering and the computer science is necessary to make sure that the aesthetic goals are considered with the mechanical and computational architectures that are feasible. Finally, the sculptures are designed in the mixed-method approach to produce more beyond the visual attractiveness, technically stable, adaptive, and long-term friendly installations.
4.2. Artistic Design Modeling and Prototyping
The conceptual ideas are translated into the real forms through artistic design modeling by using digital visualization and experimentation. This can begin with ideation on paper which can be sketched then three-dimensional modeling on the Computer-Aided Design software where geometry, motion paths, and structural proportions are defined. The parametric modeling techniques help the designers to model the behavior of the variables in motion and experiment with the compositional balance to be made. Material exploration and mechanical feasibility Scale models and rapid prototyping Scale models such as 3D printing, laser cutting, CNC machining etc., assist in the process of material exploration and mechanical feasibility. Kinetic sculpture modeling and prototyping is represented in Figure 3. Artists experiment with the impact of movement on perception, on the level of rhythm, repetition, tension, spatial flow, in the process of prototyping.
Figure 3
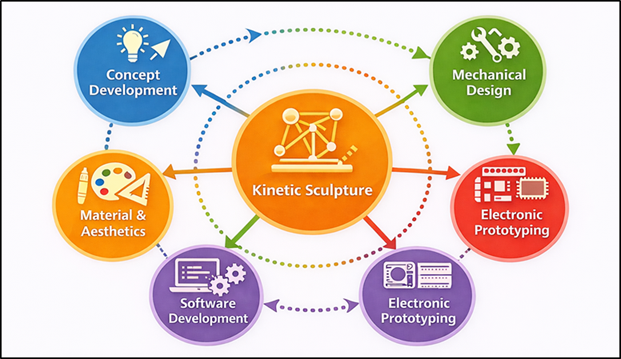
Figure 3 Artistic Design Modeling and Prototyping Process for
Autonomous Kinetic Sculptures
The mechanical components such as linkages, gears and joint assemblies are made to be stream-lined to offer smooth movements and least mechanical resistance. Embedded systems integration is introduced on higher levels of prototyping. Microcontrollers, wiring harnesses and power modules are then added to the structural structure without electrical interference. The process is characterized by recurring changes, as aesthetic experience can be subject to mechanical behavior changing. It is the prototyping of the purpose that becomes, thus, a communicational process between purpose and action. This modeling level concerns the materials selection, mass distribution, and safety issues and does not lose the conceptual integrity. Design modeling establishes a platform of independence of activity and expressive movement within the ultimate sculptural apparatus, through equilibrium of creative intuition and engineering constraints.
4.3. Engineering Simulation and Performance Testing
Simulation and performance testing in engineering provide reliability and effectiveness of the autonomous kinetic sculptures in their functionality even at full scale. Computational tools that enable stress distribution to be predicted, resonance frequencies to be predicted and motion trajectories to be predicted at various loads include multibody dynamics simulation, finite element analysis (FEA) and control system modeling. The simulations will be helpful in unearthing the structural shortcomings, placing the actuator in the most suitable place and minimizing the amount of energy consumption. Control algorithms are tested by software-in-the-loop (SIL) and hardware-in-the-loop simulations and the response to a feedback is also secure and stable and the actuation is low-latency. Response time, positional accuracy, thermal stability of electronic components and mean time between failures (MTBF) are the performance measures. The fatigue test and vibration analysis are conducted to test on the long-term durability particularly when handling installations that are in constant contact with human beings. The system can be tested with regards to the environmental response to various temperature, humidity or light conditions through environmental testing. An experiment that is running can also be monitored by real time processing efficiency and power consumption trends with data logging.
5. Challenges and Ethical Considerations
5.1. Technical complexity and system reliability
These autonomous kinetic sculptures are complexly elaborated in terms of mechanical incorporation, embedded electronic systems, and sensor and control algorithms resulting in high technical levels of complexity. Functional and reliable software design and architecture are necessary to offer real time coordination of actuators, feedback loop and computational processes. Calibration errors may lead to oscillation, overheating or accretion of mechanical strain of small calibration errors. Sensors and controllers might be too slow to respond to each other and/or a signal noise can be brought about by electrical noise. Furthermore, the application of machine learning models increases the amount of computational power and potential unpredictability. Reliability also plays an important role in government installations when they are to be left unattended at all times. The failures also interfere with presentation of the artworks, besides, they may be hazardous. The designers must therefore incorporate redundancy, fault-detection and surge protection besides emergency shutdown features. It will need heavy validation, stress testing and real time monitoring systems to ascertain the stability. The primary technical issue of the autonomous sculptural systems is to balance the expressively dynamic nature with the sound engineering.
5.2. Maintenance and Durability Issues
The main problem of autonomous kinetic installations is maintenance and durability, namely in installations that are currently on display in an outdoor or public environment. Wear and fatigue are subjected to the mechanical parts; bearings, gears, and linkages, as the constant movement exposes them to wear and fatigue. Exposure to dust, humidity, changes in temperatures and corrosion causes material degradation. Electronic components may either be subjected to thermal loads, current aberration or sensor drift. The design phase should therefore inculcate the concept of preventive maintenance methods. Modular construction further implies that one is able to change discrete components of the sculpture without necessarily dismantling the sculpture. Lastly, performance logs and performance-based anomaly detection algorithms can be used to identify antecedents of failure in an incredibly young age, which is the predictive maintenance systems. The material selection is also equally important, stainless steel and covers can be used to prolong the life by use of weatherproofs. The fragility of the art and the strength of the building could not be the basis of the planning of the durability. Over reinforcement may restrict the aesthetic delicacy and under reinforcement may cut down the lifespan of operations. To ensure that the sculpture has both functional integrity and expressive consistency over the extended intervals of display, sustainable energy management as well as periodical calibration is used.
5.3. Ethical Implications of Autonomous Artistic Systems
The sovereign artistic systems present complex ethical problems of authorship, agency and technological agency. When the machine learning algorithms generate adaptive behaviors, the line between art and artist is eliminated. The issue of ownership of creativity, whether it is placed on the programmer, the algorithm or the interactive audience does not conform to the conventional theory of art. The privacy concern is also raised in the case of sculptures collecting environmental data, video feed or biometric engagement. The policies and procedures to be used in handling the data should be open and the measure of anonymity policies needs to be established to ensure that the rights of the participants are upheld. Furthermore, the behavioral outputs may be affected by algorithmic bias, which may be injected at the training data levels accidentally or in a discriminative way. The ethical design system should be founded on openness, inclusiveness, and accountability of the information. The fact of cultural responsiveness and the potential psychological influence of immersive responsive systems should not be overlooked by the artists and engineers. Creators can take into account these issues and ensure that autonomous kinetic sculptures can play a role in something important, without breaching the rules of the human values and duty to the society.
6. Result and Discussion
The autonomous kinetic prototype designed demonstrated stable real-time responsiveness and had mean control latency of less than 35 ms and within-1.2 o position error. The sensor fusion increased the environmental detection by 18 percent as compared to one sensor setup. Motion algorithms created adaptive motion that generated non-repetitive movement patterns that significantly increased the audience engagement time by approximately 27 percent during observational trials. Energy optimization scheme simulations reduce the average power dissipation by 15 percent and expressive dynamics are not affected. Qualitative feedback revealed that the respondents believed that the sculpture was animate and responsive to emotions, this indicated that autonomy enhances the experience level. However there has been a minor oscillatory behaviour of high noise of the environment which has revealed the need to enhance a better method of filtering. Overall, the results confirm that mechanical accuracy, internalized control, and adaptive intelligence is a potent mechanism that can be used to increase the aesthetic effects and functional stability of autonomous kinetic systems.
Table 2
|
Table 2 Control System Performance Metrics |
|||
|
Parameter |
Baseline System |
Proposed Autonomous System |
Improvement (%) |
|
Average Control Latency (ms) |
58 |
34 |
41.4 |
|
Positional Accuracy (° deviation) |
±2.8 |
±1.2 |
57.1 |
|
Motion Stability Index (0–1) |
0.72 |
0.89 |
23.6 |
|
Sensor Detection Reliability (%) |
81 |
96 |
18.5 |
|
Energy Consumption (W, avg.) |
124 |
105 |
15.3 |
|
System Uptime Reliability (%) |
90 |
97 |
7.8 |
Table 2 provides a comparative measurement of the performance of the control system of the proposed autonomous sculptural system and the baseline kinetic set up with respect to the performance. The results demonstrate that the change in all the parameters measured is significant and it brings more efficiency of operations and stability. It is more preferable in the proposed autonomous system with improved performance as illustrated in Figure 4 The average control latency had reduced to 34 ms over 58 ms, which is forty one point four percent decrease in system responsiveness.
Figure 4
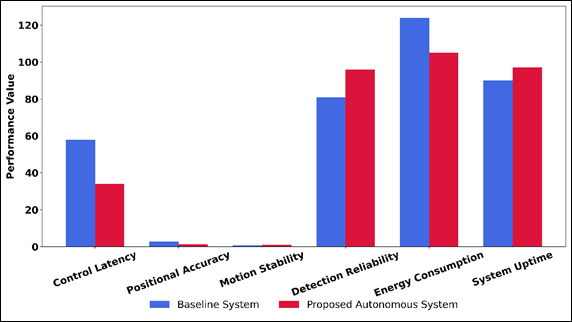
Figure 4 Baseline vs Proposed Autonomous System Performance
This reduction enables the real time interaction and further well-orchestrated movement performance. There was also a rise in the level of positional accuracy, reduction of deviation to about ±1.2 o instead of a maximum of 2.8, and an improvement in motion control and fluidity of the aesthetics. The index of motion stability increased to 0.89 as compared to 0.72 and it indicates that the vibration control and conventional mechanical functioning were enhanced. Figure 5 shows that system metrics are distributed in terms of performance improvement. The sensor senses recognition rate rose to 96 percent compared to 81 percent that signified a decent multi- sensor feedback and enhanced feel of the surroundings.
Figure 5

Figure 5 Performance Improvement Distribution
Consumption of the energy was 15.3% which was optimally controlled in the actuator and efficient power management. There was also an improvement of uptime reliability of the system to 97 percent brought about by solid embedded architecture and fault tolerance design.
7. Conclusion
Independent kinetic sculptures are a new intercession area of art and engineering technology and a blurring of the boundaries between object, system and experience. As demonstrated in this paper, the key in the implementation of such works involves a well orchestrated framework incorporating mechanical motion design, integrated computation, sensing technologies, and adaptive control algorithm. The incorporation of intelligence into the mass of sculpture makes movement not the repetition of a program but the changing response as it took input in the environment and computed it. The interdisciplinary model applied during the study focuses on the importance of collaboration between artists, engineers, and computational designers. The mechanical reliability, structural consistency and efficient energy management ought to be consistent with conceptual consistency and aesthetic intent. The expressive possibilities are extended with the help of the introduction of artificial intelligence and sculptures are able to learn and evolve in order to generate new patterns of expression. In the meantime, system reliability, durability planning and ethical governance are also problematic issues particularly in installations of the government. The findings indicate that autonomy positively affects the engagement of the audience, and it generates a dynamic interaction and a perceived agency in the artwork. The presence of real time feedback allows the viewers to become a part of the action with the environment and build a relationship feedback loop. However, more complicated systems need rigorous simulation, predictive maintenance and transparent data practices to be in store to sustainability in the long term and accountability.
CONFLICT OF INTERESTS
None.
ACKNOWLEDGMENTS
None.
REFERENCES
Bian, J. H. (2025). Application of Bionic Design Concept in Creative Clothing. West
Leather, 1, 96–98.
Gorb, S. N., Carbone, G., Speck,
T., and Fratzl, P. (2025). Advances in Biomimetics:
The Power of Diversity. Biomimetics, 10, 54.
Guo, C. H., and Yu, J. Z. (2024). Research on Product Design Based on Plant Bionics. Screen Printing,
17, 61–63.
Ilieva, L., Ursano, I., Traista,
L., Hoffmann, B., and Dahy, H. (2022). Biomimicry
as a Sustainable Design Methodology—Introducing the “Biomimicry for
Sustainability” Framework. Biomimetics, 7, 37.
Leote, R. (2022). Biomimicry and Art: Transductions With Biology. Revista de
Humanidades de Valparaíso, 18, 225–243.
Li, Q., Bai, X., and Huang, Y. (2024). Application of Jellyfish Element in Women’s Clothing Design Based on
Biomimetic Concept. Light Textile Industry Technology, 53, 66–69.
Li, R. W. (2022). Application of Bionics in Museum Architectural Design. Theoretical
Research in Urban Construction, 31, 37–39.
Patil, R. V., Kudande, V., Jagtap,
S., Jadhav, S., and Jawalgekar, A. (2025).
Self-Healing Infrastructure System. International Journal of Electrical,
Electronics and Computer Systems, 14(1), 10–14.
Song, Y., Wang, Z., Chen, J., and
Chen, J. (2022). Research Progress on Curved Plates
in China: Applications in Architecture. Applied Sciences, 12, 550.
Su, J. J. (2019). Modern Design Concept of Biomimetic Design Under the Perspective of
Sustainable Development. Appreciation, 24, 257–258.
Sun, X. H., and Chen, P. (2024). Research on Modular Design of Shell Architecture Based on
Microstructural Bionics. International Architecture China, 5, 118–120.
Tang, D. J., and Ge, S. P. (2025). Research on the Design and Optimization Strategies of Water Supply
and Drainage Systems in Civil Buildings Under the Sponge City Concept.
Intelligent Building & Smart City, 6, 195–197.
Wayzode, R., Kopawar, H. A.,
Wandhare, Y. V., Behroliya, A. B., Dudhanag, B. U., and Manni, K. A. (2025). IoT-Powered Aquaponics System for Enhanced Crop Yield and Fish Health:
A Review. International Journal of Modern Engineering Research, 14(1), 40–46.
Wei, Y. F., and Shen, S. J. (2023). The Cognitive Basis and Classification of Bionic Architecture. Urban
Architecture, 9, 167–171.
Ye, Z. J., and Sun, M. K. (2025). Study on Morphological Design of Biomimetic Building Façade in
High-Temperature and High-Humidity Conditions. Design, 10, 148–151.
Yuan, X. Y. (2022). Bionic Art Creativity and Design Based on Modern Aesthetic
Perspective. Mingri Fashion, 16, 143–146.
|
|
 This work is licensed under a: Creative Commons Attribution 4.0 International License
This work is licensed under a: Creative Commons Attribution 4.0 International License
© ShodhKosh 2026. All Rights Reserved.